ros2 humble publisher and cyclone dds subscriber
Hey, i am trying to implement a chain of ros2 humble subscriber and publisher which in the end publish to a native cyclone-dds subscriber which then again publishes to a cyclone-dds subscriber(to measure the message time it takes to pass all nodes). I have finished the parts where only humble or cyclone-dds is used, but I failed to communicate between the ros2 publisher and the follow-up cyclone-dds subscriber.
I am publishing a string and therefor use <std_msgs::msg::String>in humble. In cyclone-dds i am currently using the default example(https://cyclonedds.io/docs/cyclonedds/latest/getting_started/helloworld/helloworld_building.html)
and therefor use the HelloWorldData_Msg_desc created by
HelloWorldData.idl
module HelloWorldData
{
struct Msg
{
@key long userID;
string message;
};
};
They have a different message type and my question is now if it is smarter to modify the message in ros2 humble or the receiving cyclone dds message? I am not sure how it works with .msg, .idl and the rosidl_generator_dds_idl and how they communicate with each other. Do I manually have to convert the .msg into .idl?
Can somebody please help me with this or provide some useful links I can check out.
PS: I always used rmw_cyclonedds_cpp as my middleware.
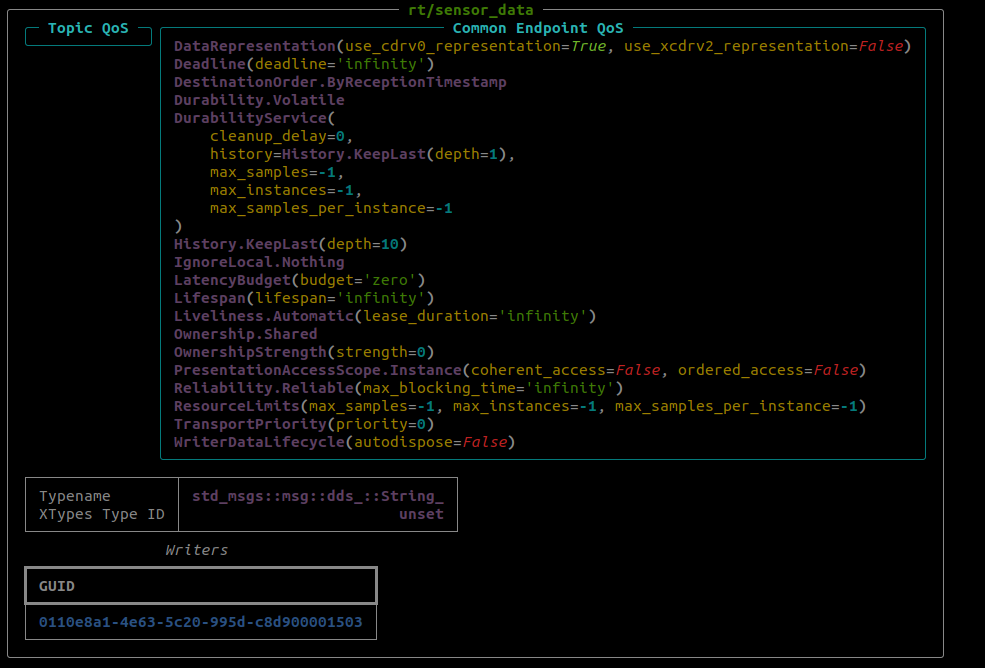
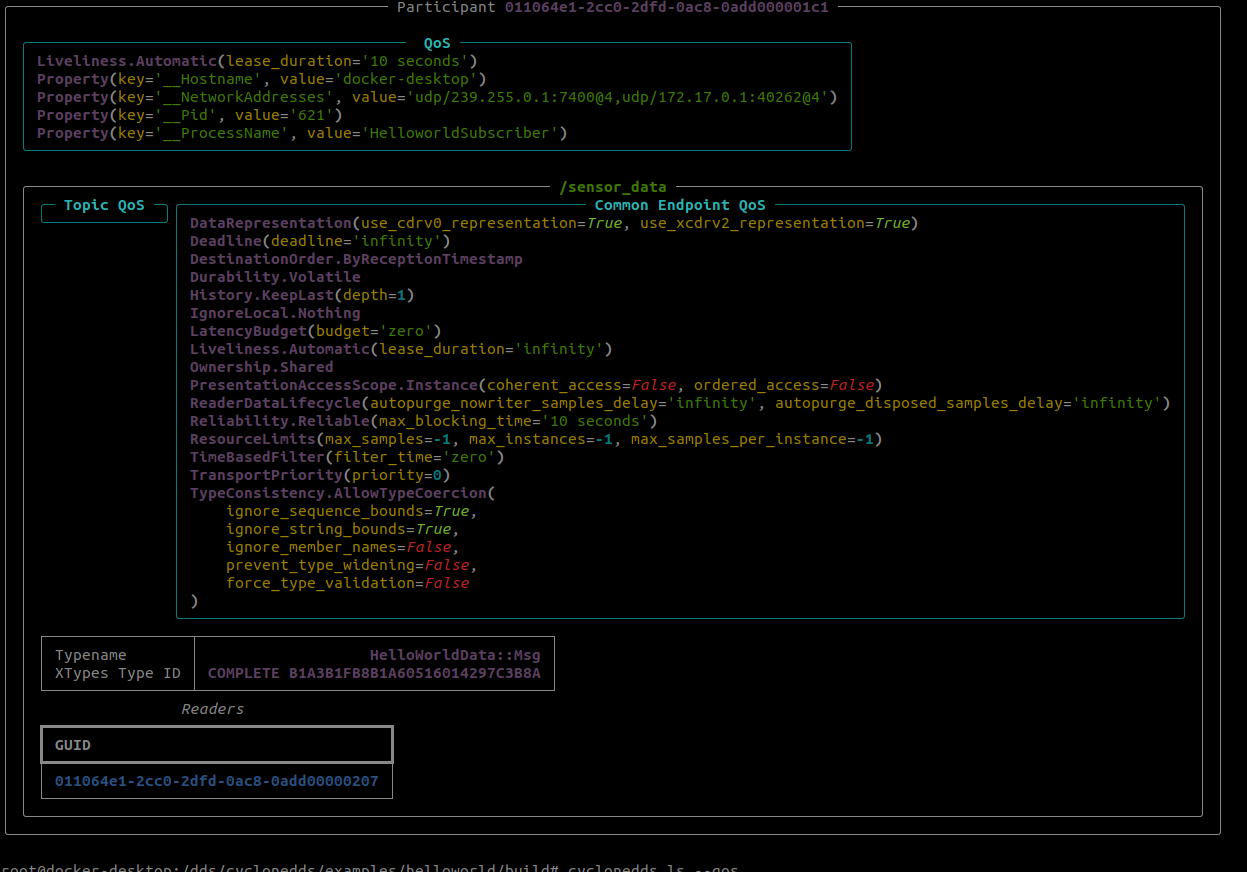
In these images you can see the publisher in humble (rt/sensor_data) and the subsciber in cyclone dds (/sensor_data)