
local_planner seeing invisible wall
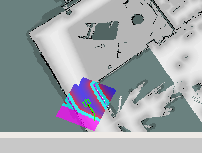
As seen in the image, the robot is detecting a curved wall in front of it and is stopping the route. However there isn't any wall in that position, just the ones on the sides, as seen on the map. What could it be?
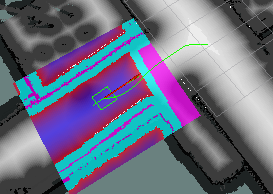
Again, there is nothing in front of the robot, but it is seeing a wall
I'm also receiving these warnings:
[WARN] [1683209662.283217847]: Map update loop missed its desired rat e of 5.0000Hz... the loop actually took 0.2276 seconds.
[WARN] [1683209662.457042787]: Control loop missed its desired rate o f 5.0000Hz... the loop actually took 0.2017 seconds.
I don't know if it has something to do with it, as I have been receiving this warnings way before this problem.

Please do not post screenshots of text. Instead, copy/paste the text into the description and format it with the 101010 button.
Thanks for the headsup! It's fixed now.