
TurtleBots 3 Burger: Multi robot SLAM IRL

Hello,
I have a fleet of 4 TurtleBots and I want to make a multi robot SLAM mapping. I know that it is possible in Gazebo that each robots create a map and a higher program merge the maps but I want to do it with my real robots, do you know how to do that ?
Ps: I used ROS Noetic and already set up namespace for each robots
Thank you for any information!
Edit: I don't even manage to launch a slam program on one robot so I ask for your help too.
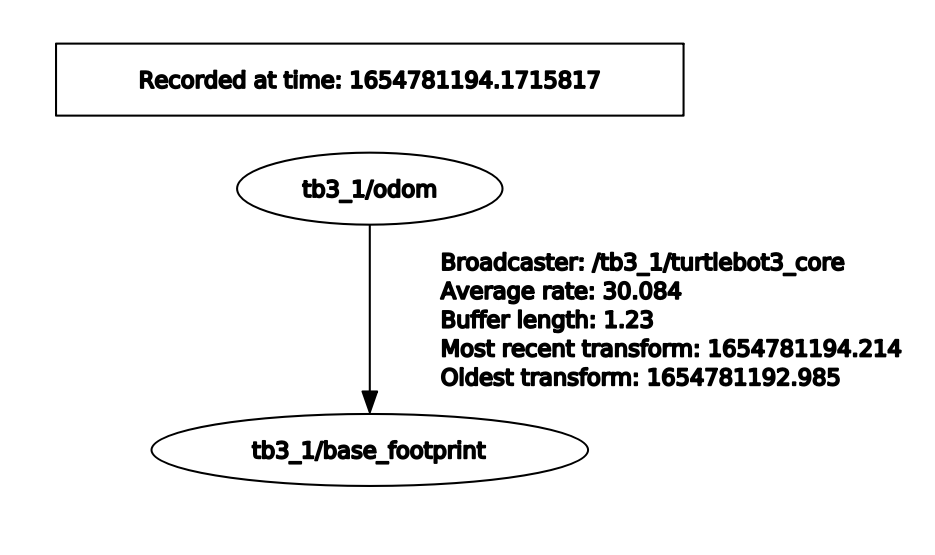
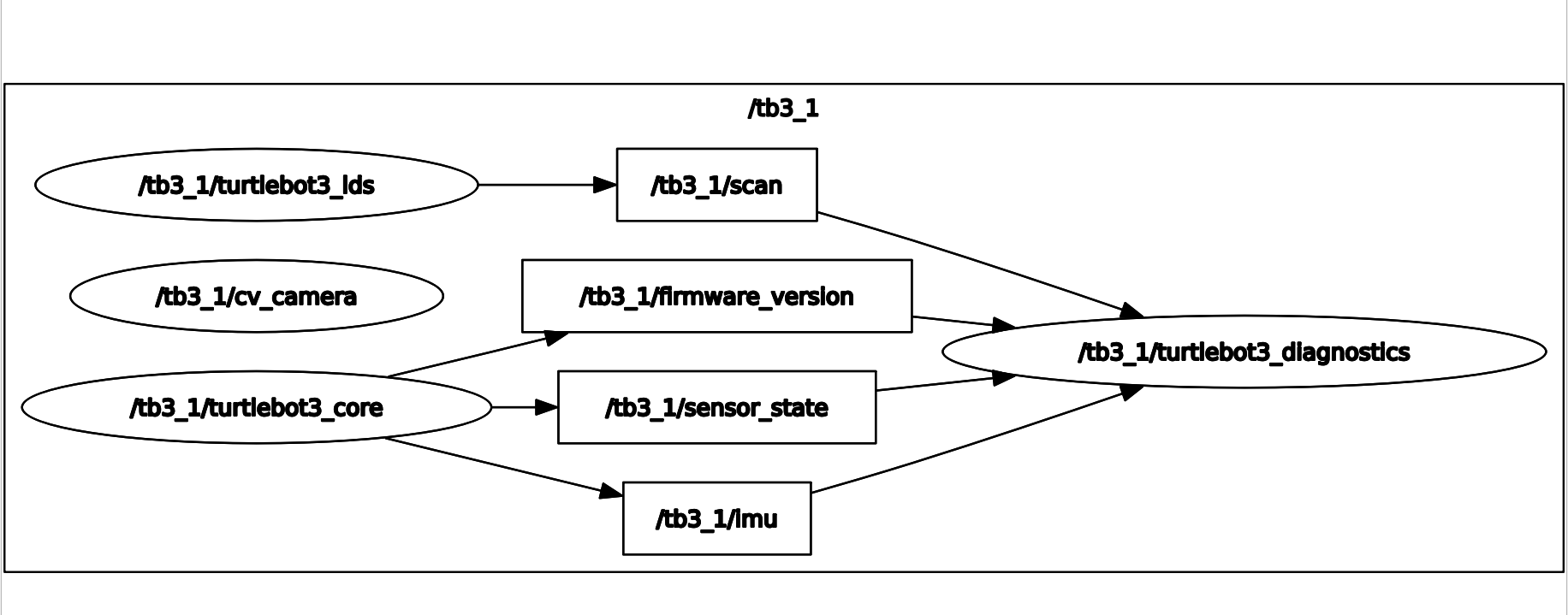
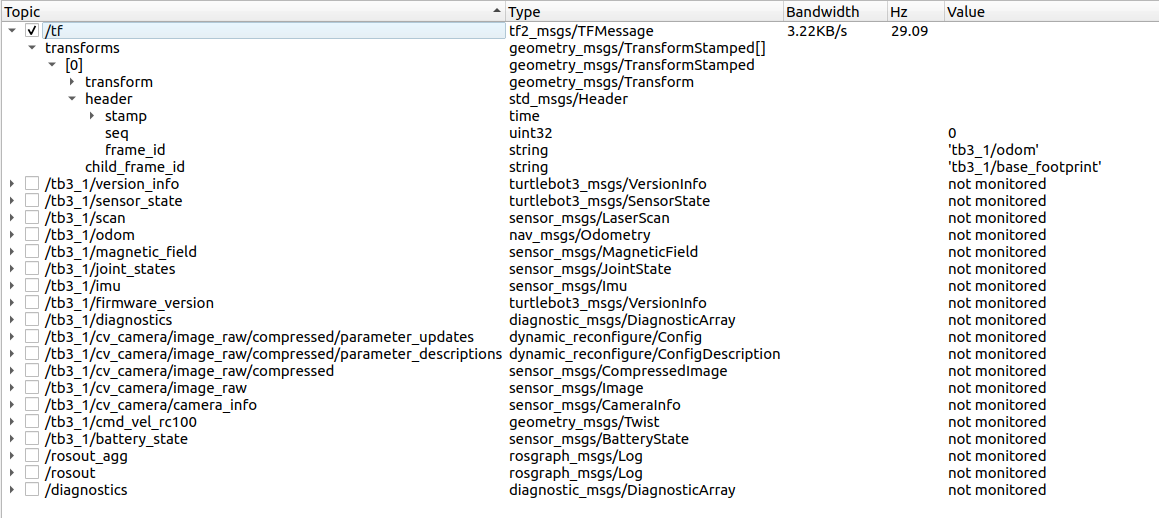
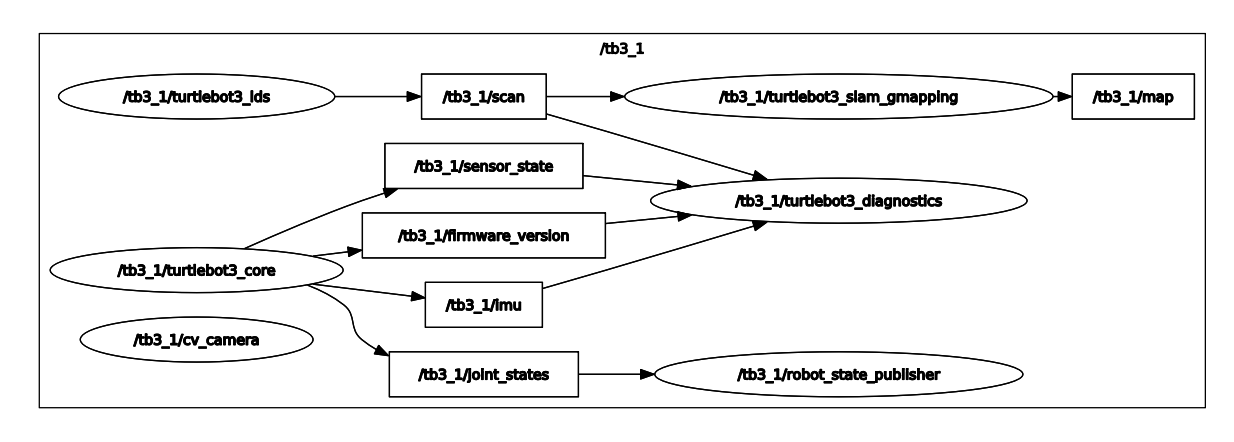
To set up my robots, i followed the following tutorial so basically when i launch the following command on my Tb:
ROS_NAMESPACE=tb3_1 roslaunch turtlebot3_bringup turtlebot3_robot.launch multi_robot_name:=tb3_1 set_lidar_frame_id:=tb3_1/base_scan
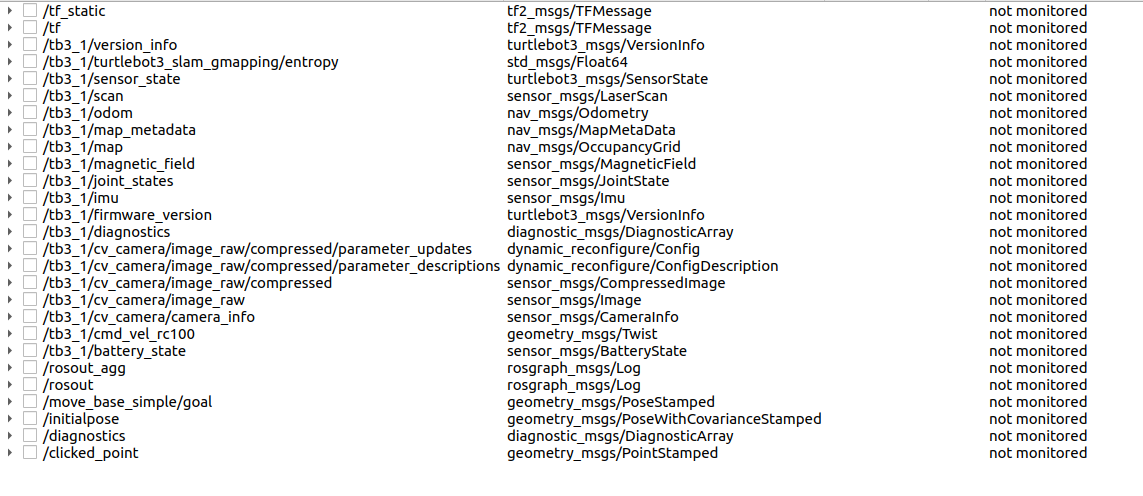
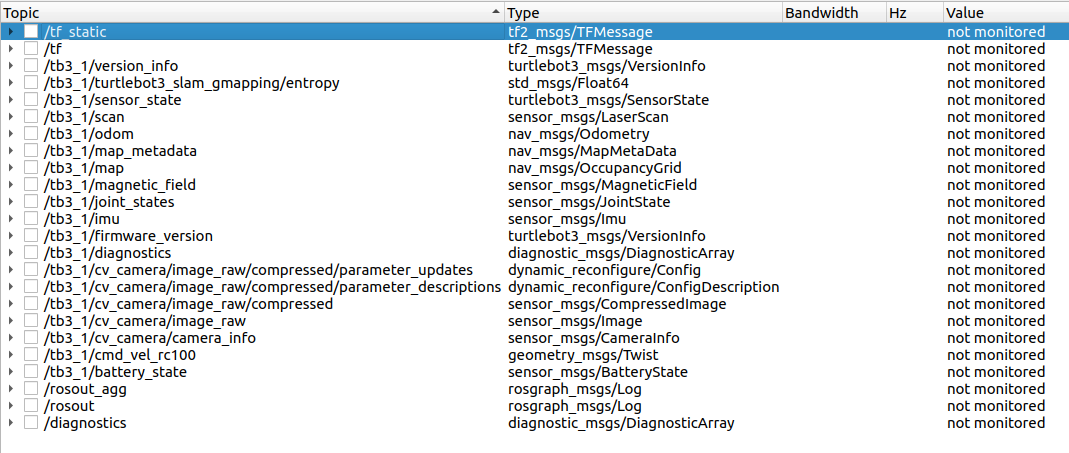
I get the following tf tree, node graph and topics:
After i launch on my computer:
ROS_NAMESPACE=tb3_1 roslaunch turtlebot3_slam turtlebot3_slam.launch multi_robot_name:=tb3_1
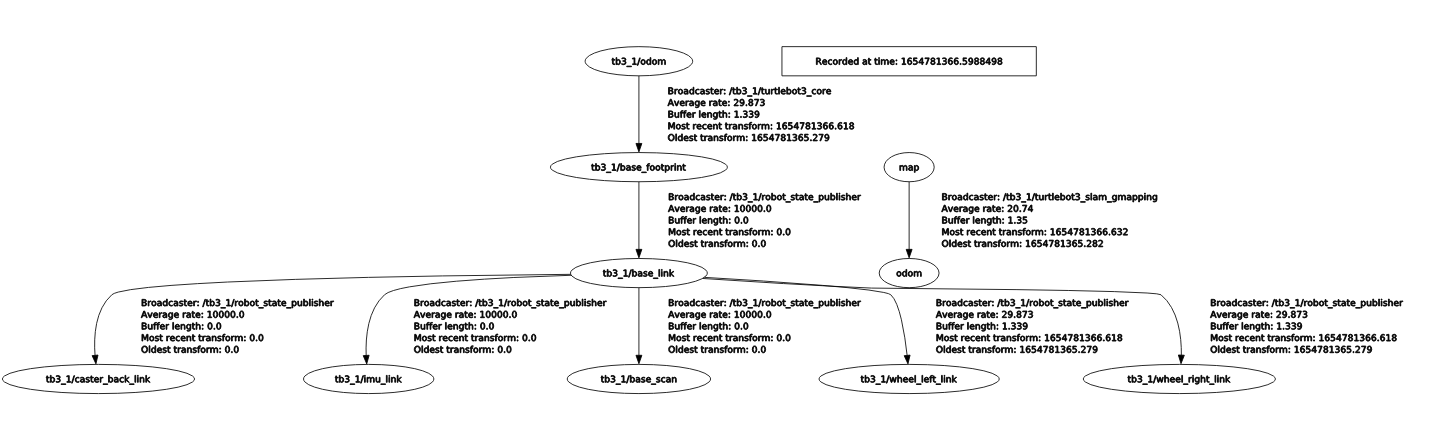
and a tf problem appear, the map tf connect to odom tf and not to tb3_1/odom
 and a warning message tell me that there is a problem with odom (logic because it should be tb3_1/odom):
and a warning message tell me that there is a problem with odom (logic because it should be tb3_1/odom):
[WARN ] [1654781371.592635721]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far.
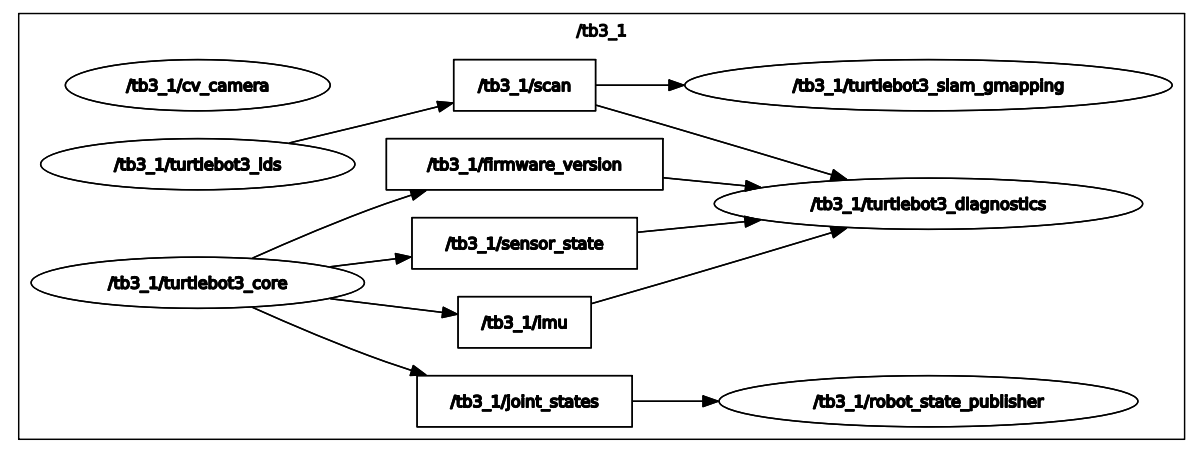
I tried to do it step by step to find the problem by launching on my computer:
ROS_NAMESPACE=tb3_1 roslaunch turtlebot3_bringup turtlebot3_remote.launch multi_robot_name:=tb3_1
and after:
ROS_NAMESPACE=tb3_1 roslaunch turtlebot3_slam turtlebot3_gmapping.launch set_odom_frame:=tb3_1/odom
and i got a nice tf but still warning message and no data in the map topics:
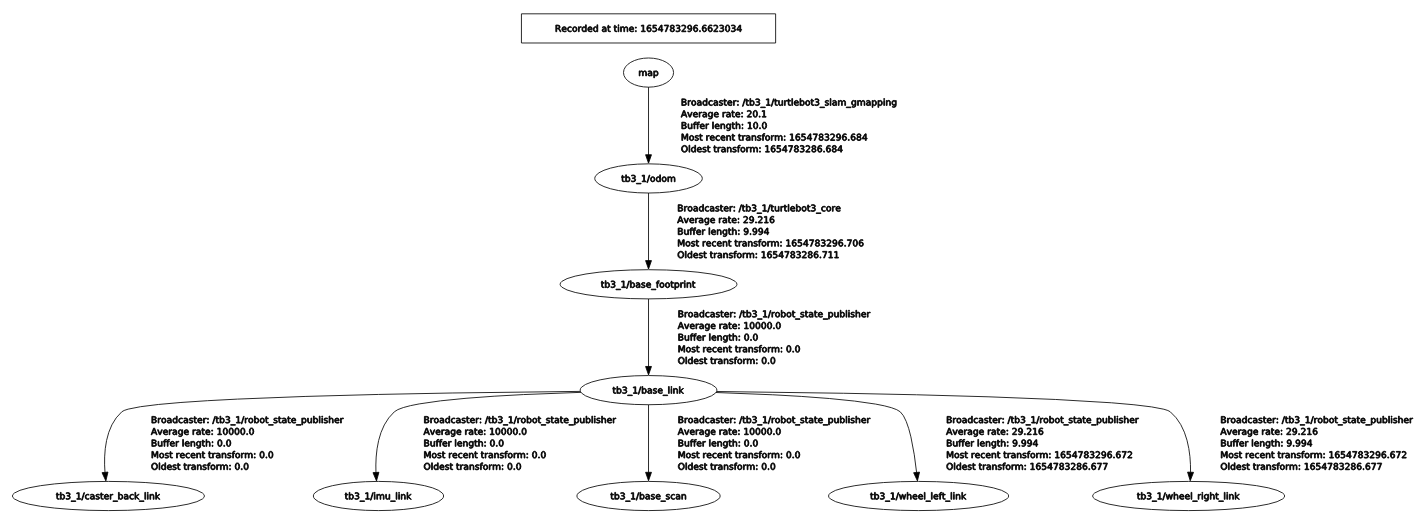
 with the warning message:
with the warning message:
[WARN ] [1654783298.853778784]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far.
From there i tried a lot of thing like edit the parameters in the config files (create save of the originals and replace modified one by the saved one after test), removing ROS_NAMESPACE or modifying parameters but nothing work
Do you have any idea ?
Ps: I don't why but now i can't launch the slam program even without namespace.


Comment on your question, could you not post the errors as images, but simply copy them and add them as code? The images are now only readable if opened in a separate tab, which is a bit annoying.
EDIT also, please add the commands you run as code too. It makes it easier to follow.
Thanks for your comment, I didn't see that the warning image were no readable. I write the warning message and change the command as code
Thank you for the edit!