create a map for navigation from points?
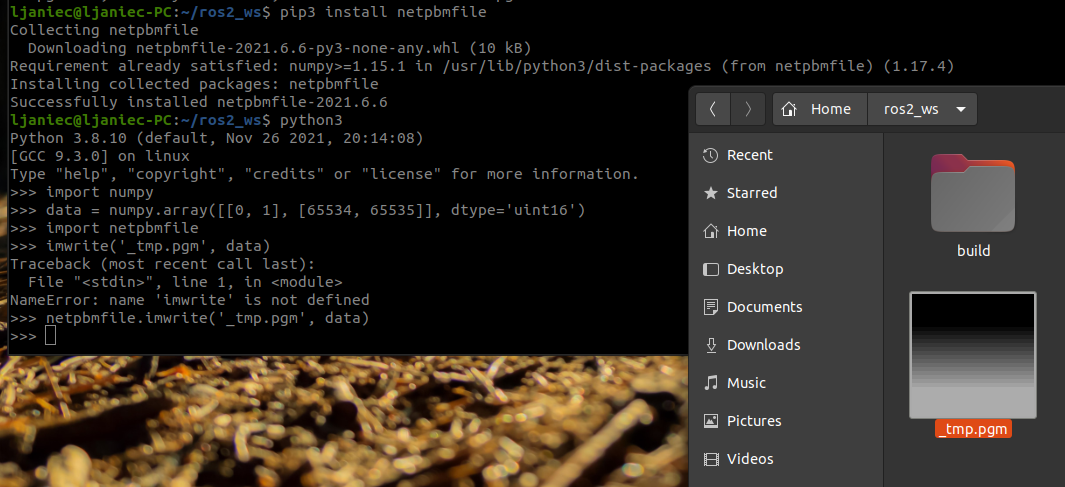
Hi everyone, I would like to create a map (pgm image and related yaml file) for robot navigation. I need to create the map inside a python code where I have all the points of interest available such as room size, position and orientation of obstacles (fixed), etc... basically i need to create a function that create a map (pgm image) from some points, for example if i have the vertices of an obstacle i need to create a shape with black outline and grey inside and so on.... Can anyone give me some guidance?
(ps: i use python with ros noetic)
add a comment