
robot_localization error in odometry with high pitch and tf wrong time

Hi
I have a robot that can move only on a plane (x-y body) but at a very steep plane. when I'm using robot localization package and I have very high pitch ( >70 deg) I get a velocity on Z body which gives a big error on position.
1) How can I use 3d localization but prevent z body axes velocity?
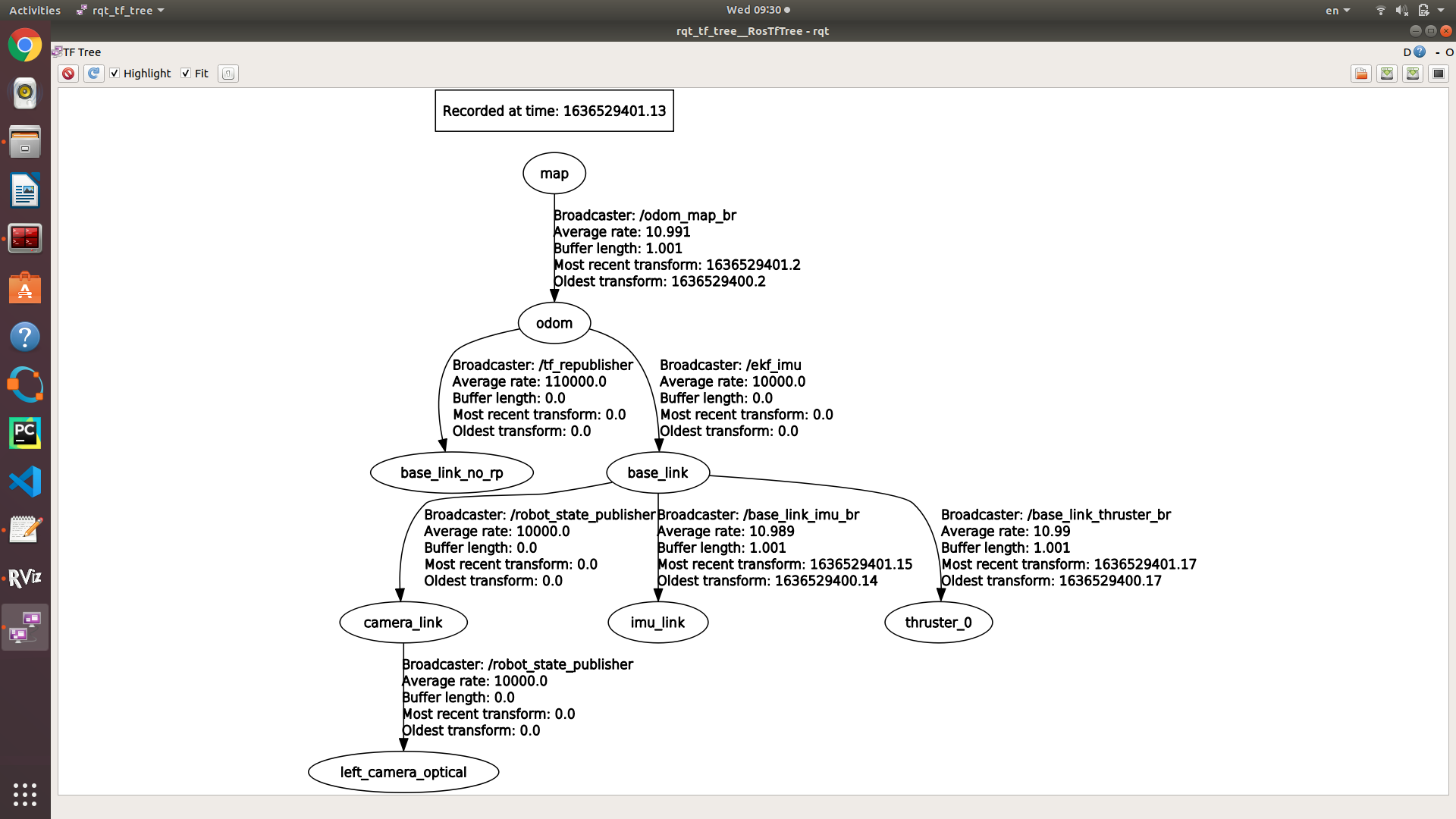
2) The tf of ekf_localization_node is coming at time zero, how can that be fixed?
thanks

Hi Nachum, I do not understand what you mean by "a robot that can move only on a plane (x-y body) but at a very steep plane.". Can you explain it a bit further? Perhaps upload a photo?
let's assume a car, it only moves forward but I don't want to use 2d mode because it drives up a very steep angle so my height changes dramatically
Hi @Nachum, I read this paper that I think deals with a similar challenge in the agricultural environment, the paper proposes the use of VineSLAM that not only uses localization but uses topological information.
You can configure take the Z velocity in body frame = 0 as a measurement. Have you tried that? http://docs.ros.org/en/noetic/api/rob...
As for the second question, are all tfs shown on the image published by nodes running on the same computer?
@janindu I tried it but i have an altitude measurement which I assume causes that velocity. all the nodes are on the same computer