
Depthmap data (image_raw topic) [closed]

Hello,
I have some difficulties while working with depthmaps - with Turtlebot simulator I'm using /depth/image_raw topic. As I can see from message header, it's in mono8 encoding, but why is step equal to 1? It should be 1280 as far as I know, right?
Update: I performed experiments with real Kinect and messages on /camera/depth/image_raw topic have encoding 16UC1 and step 1280... So how can I convert data from simulation to another encoding? Or is it possible to set simulation to produce data of same encoding as real kinect?
Actually, I want to access each pixel of depthmap (distance in mm) and do some computation with it. Using real Kinect I was able to get reasonable numbers, but I have troubles using simulated one. My code is here. Problem is that I'm getting strange numbers (too high) when I place object in front of TB (it looks like that something is overflowing).
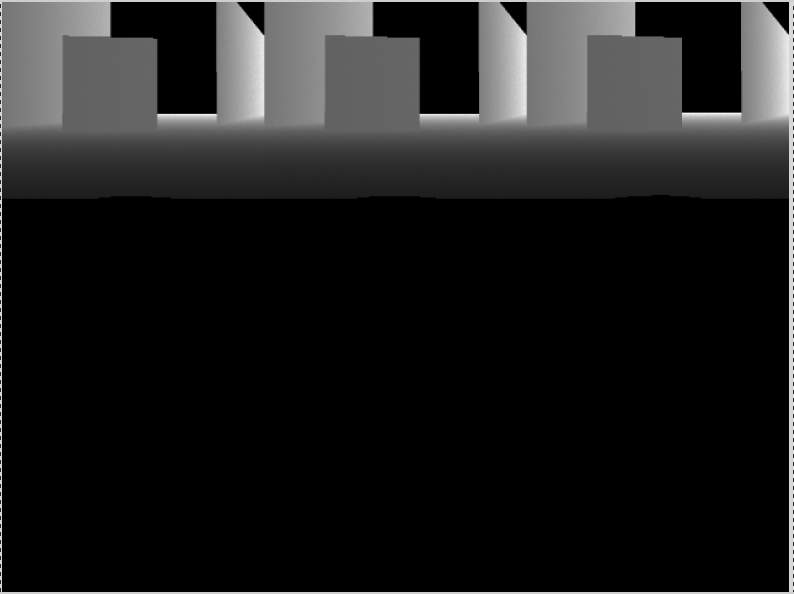
If I visualize depthmap from my code it looks like this:

Thanks in advance for any hints.
Update 2: In callback of image_raw topic I made copy of message, then I changed encoding to 16UC1, step to 1280. After then I use toCvCopy, perform some processing and then convert image to CV_32FC1 a publish it. Result is much better, but still not exactly what I want - It looks like depth map is copied three times on top of image. Despite this fact it seems to be ok.
Current code can be found here.
Many thanks in advance...

I suppose you don't have this problem anymore, right? It is now fixed, at least in Indigo