
Uncertain behavior of hand eye calibration
Hello there,
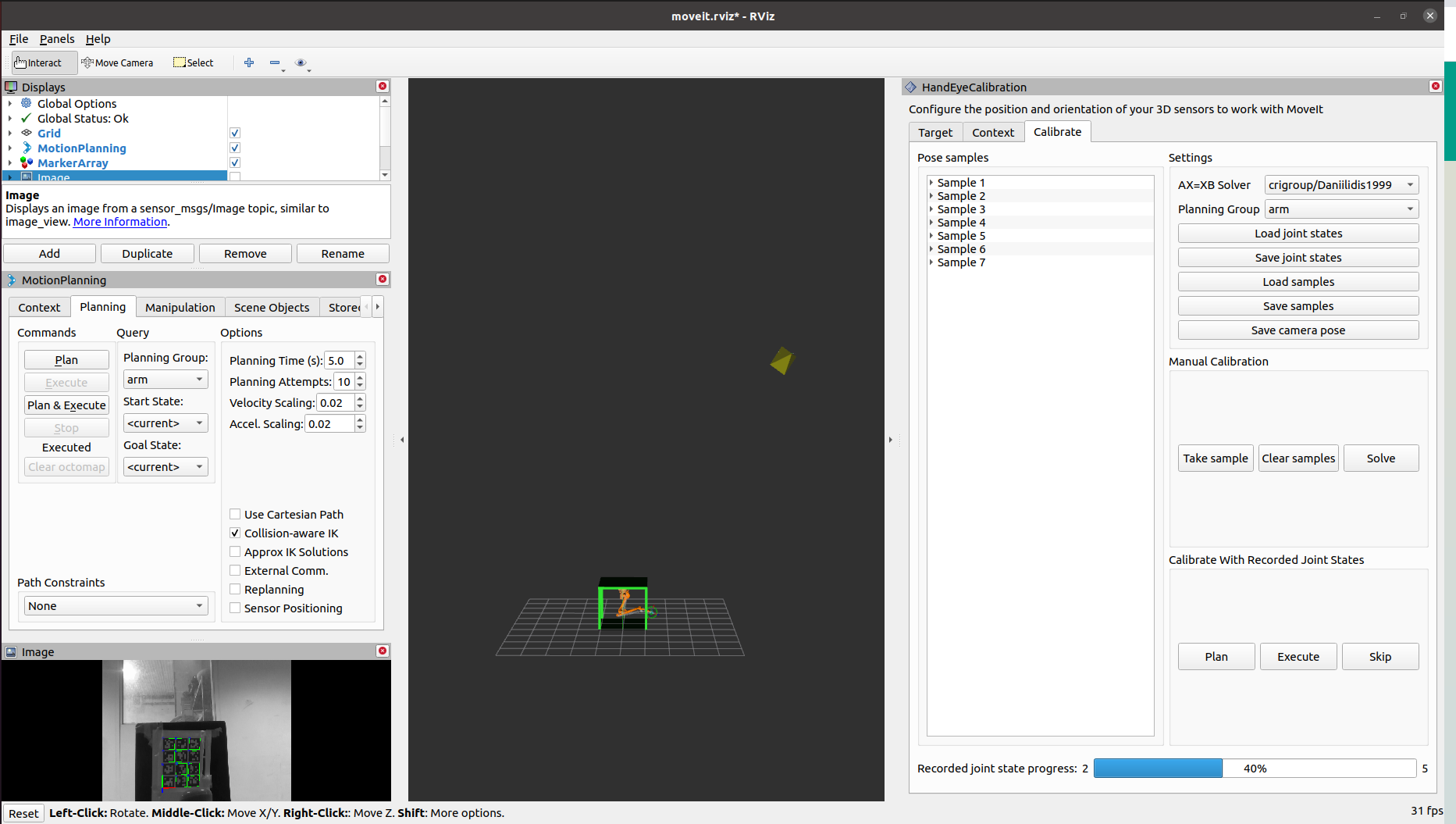
I am collecting samples from different pose for move it hand-eye calibration. Instead of solving it shows the far position of my camera after solving sample 5 as shown in the picture. Am I forgetting some steps?
What my robot looks like is described in the below image.
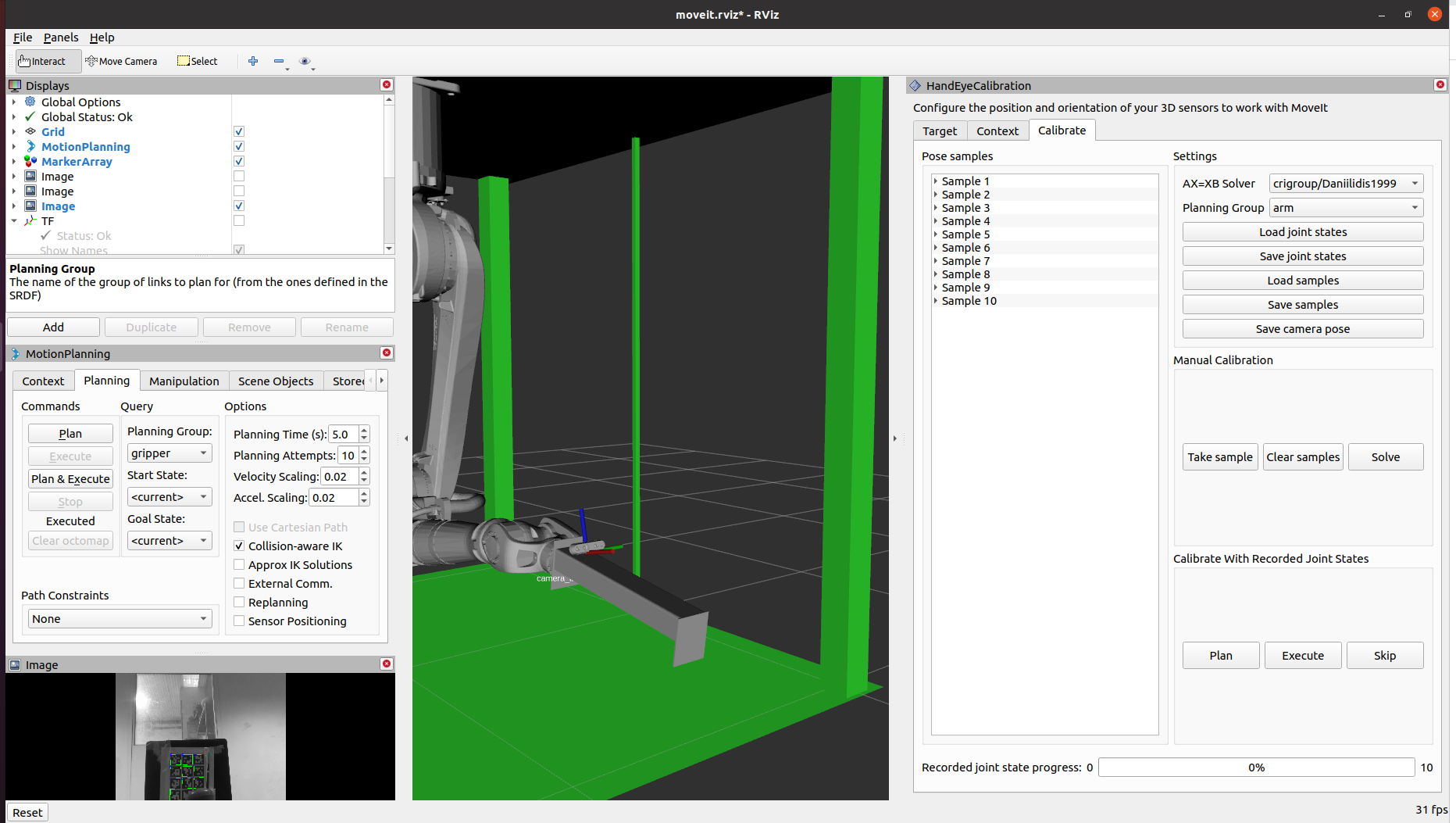
On the six-axis, I have attached an Iron rod and at the end of that rod, there is tool0 (My tool point). In the iron rod, after 10 cm from the axis-six, I have kept the camera at 3.5cm height(Z+ from the rod.).
I don't know the issue, Is something wrong with my configuration or the issue is with the hand-eye calibration?
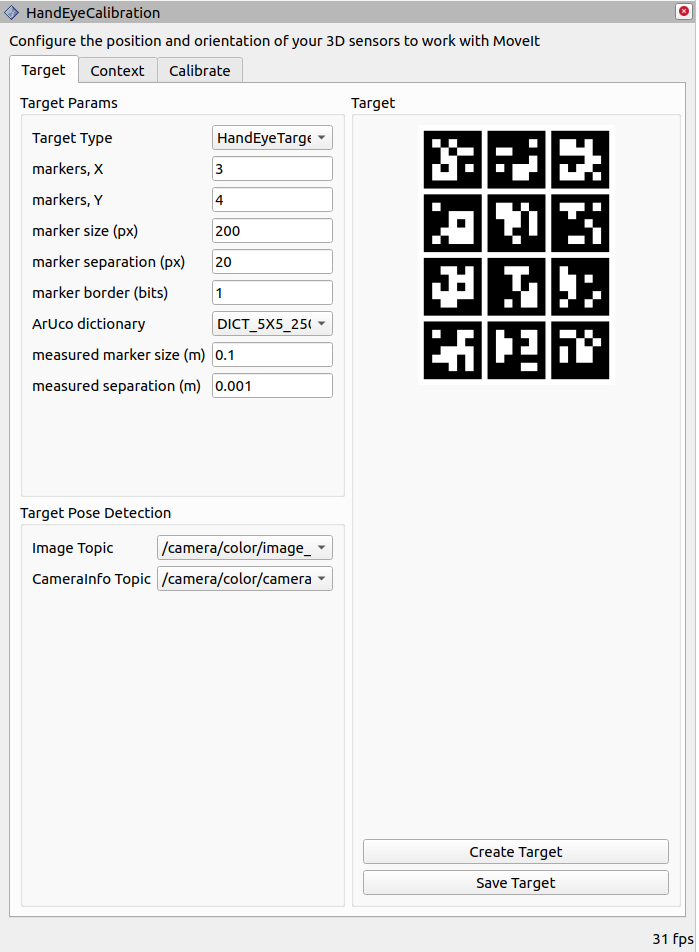
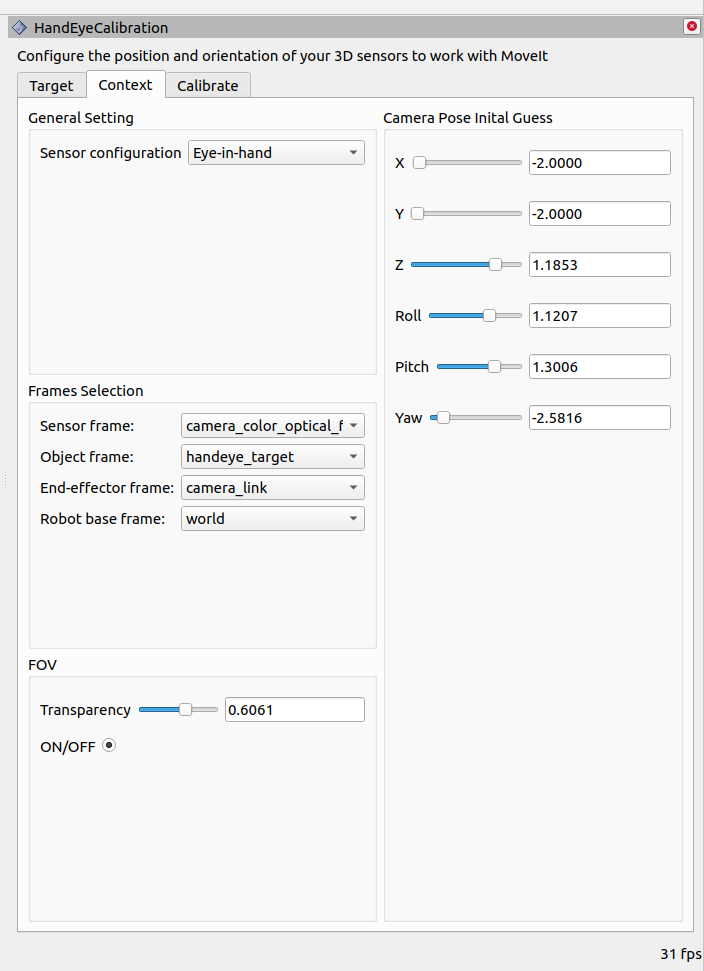
The hand-eye calibration setting is described below.
Thanks for the help!
add a comment
