
After Object Detction ros2
Hello Just getting started in ROS, and I have several problems:
i did a topic for object detection with TensorFlow ,and tested on real-time based on USB camera, and right now I'm stuck how can i test project in gazebo or rviz in orde to test in map somthing like this picture tooked from google 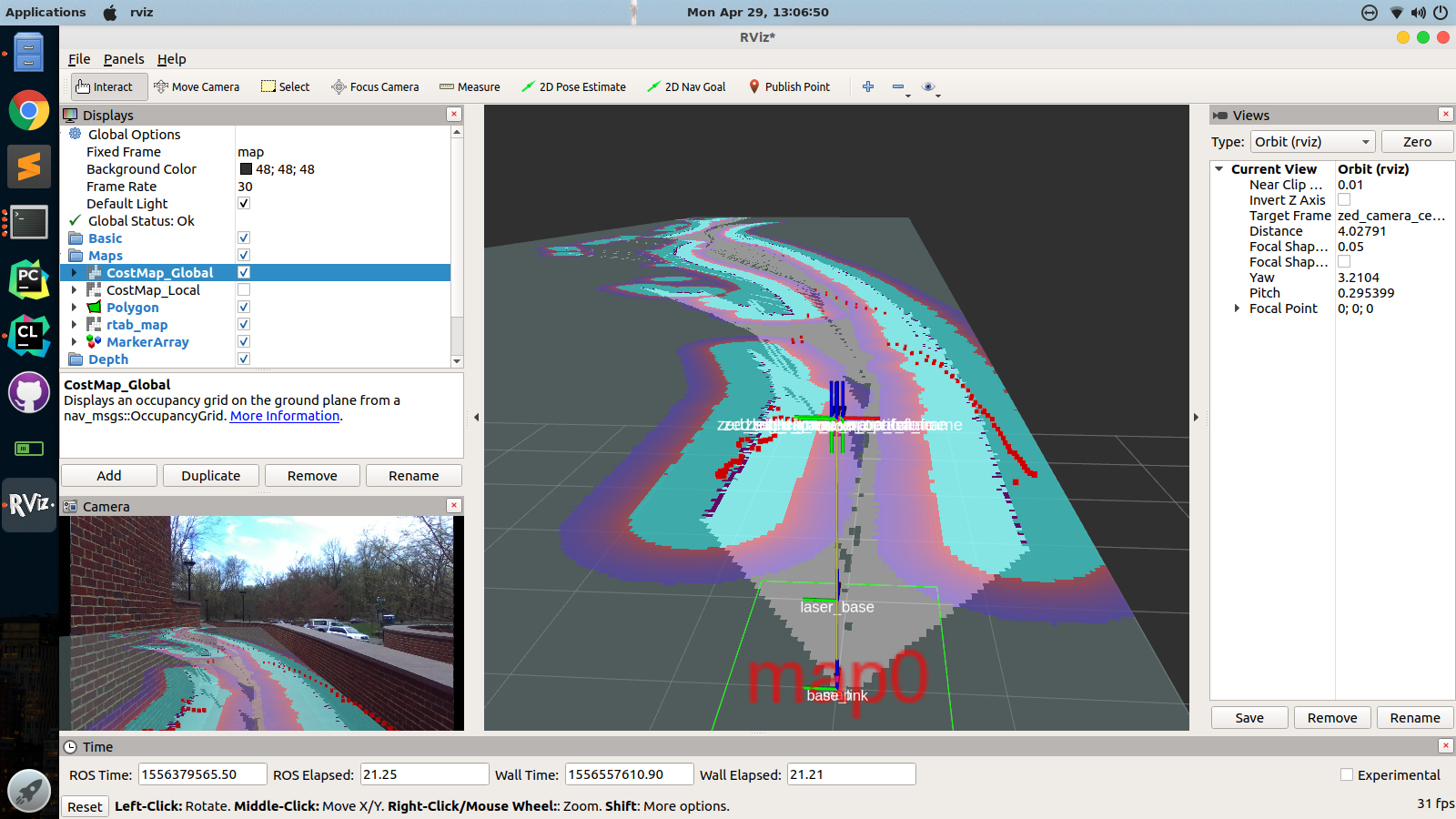
in order to test if the a robot/car can detect the object or not(pedstrain, cars etc..) thanks in advance and sorry for my bad English.
add a comment
