
Autoware & LGSVL: Vehicle Not Moving
Hello all,
I have been working with Autoware and LGSVL simulator by following the steps here to do a simulation with LGSVL simulator. I am using two different machines for running Autoware (running from source instead of docker) and the simulator. I have both the machines on a local network and gave the Autoware machine's IP address (It was something like 192.168.0.xx:9090) as bridge connection string in the simulator's Map & Vehicles tab. Here is the configuration of two machines:
Machine running the LGSVL simulator (2020.06 version) has the following configuration:
- Intel i7-2600 processor at 3.4GHz - 4 core processor which can run two threads per core (basically an 8 core machine)
- 16 GB RAM
- 500GB Hard Drive
- GeForce GTX 1650 graphics card
- Running on Windows 10
Machine running the Autoware 1.12.0 (source code with CUDA build) has the following configuration::
- Intel i7-2600 processor at 3.4GHz - 4 core processor which can run two threads per core (basically an 8 core machine)
- 16 GB RAM
- 1TB Hard Drive
- GeForce GTX 1050 Ti graphics card
- Running on Ubuntu 16.04
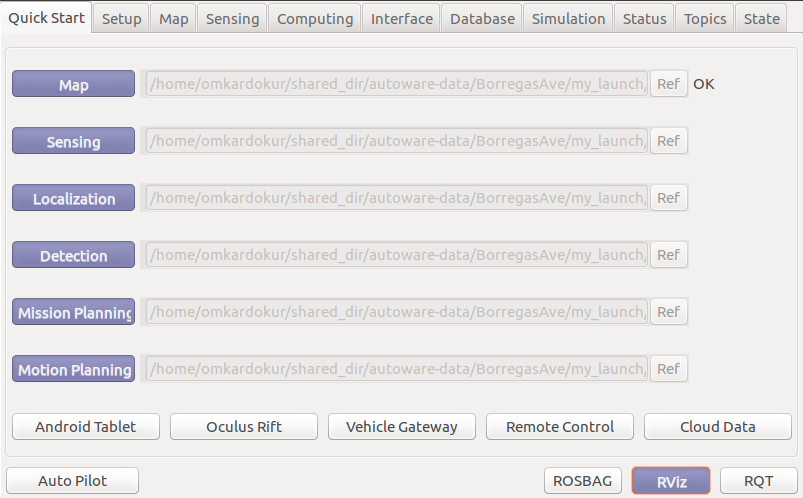
I have loaded all the launch files in the RunTime Manager for BorregasAve and clicked on RVIZ button as shown in the below figures. Although, with some errors on the terminal.
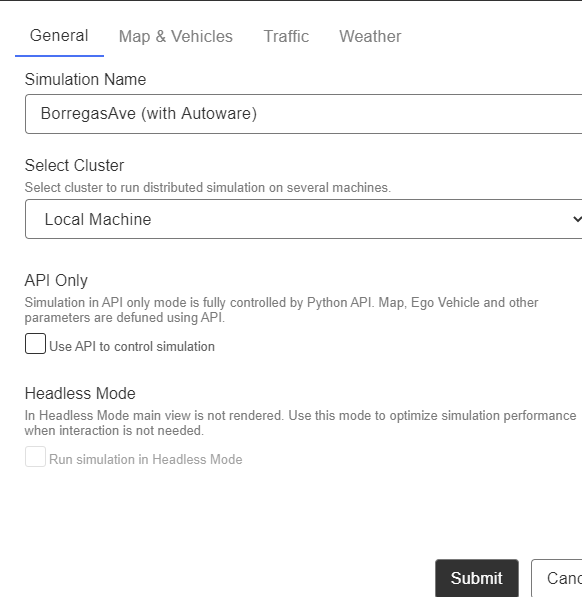
After that, I have started the lgsvl simulator in the other machine with the following settings as shown below:
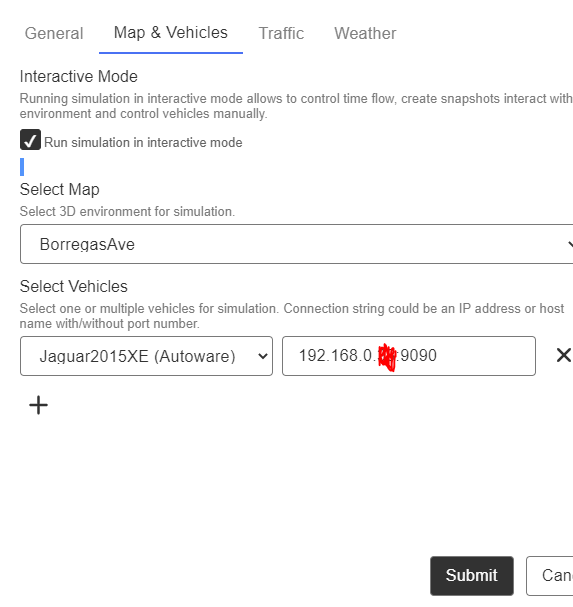
After I clicked the start button, I was able to see that the simulator was connected to the Autoware machine as shown in the below image and then I have hit play button on the simulator:
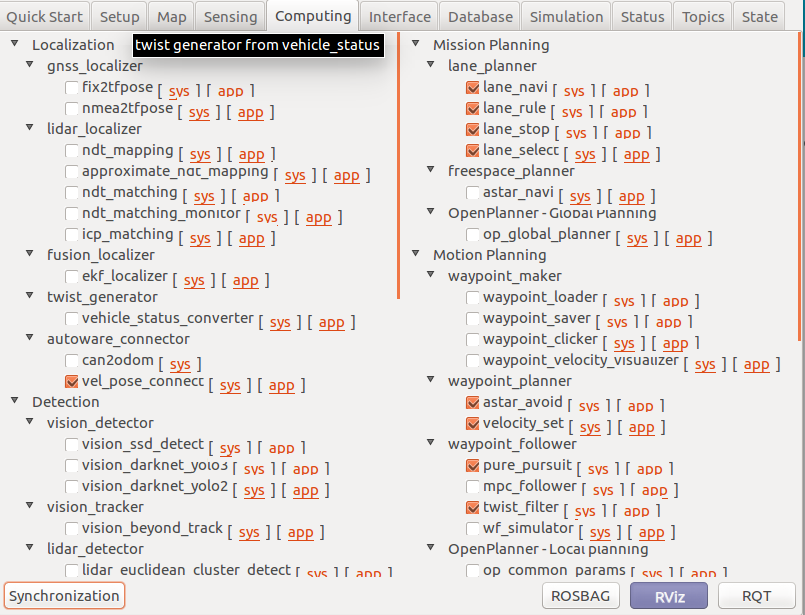
I have also selected all these from the computing tab: vel_pose_connect, lane_rule, lane_stop, lane_select, obstacle_void, velocity_set, pure_pursuit, twist_filter as shown in image below:
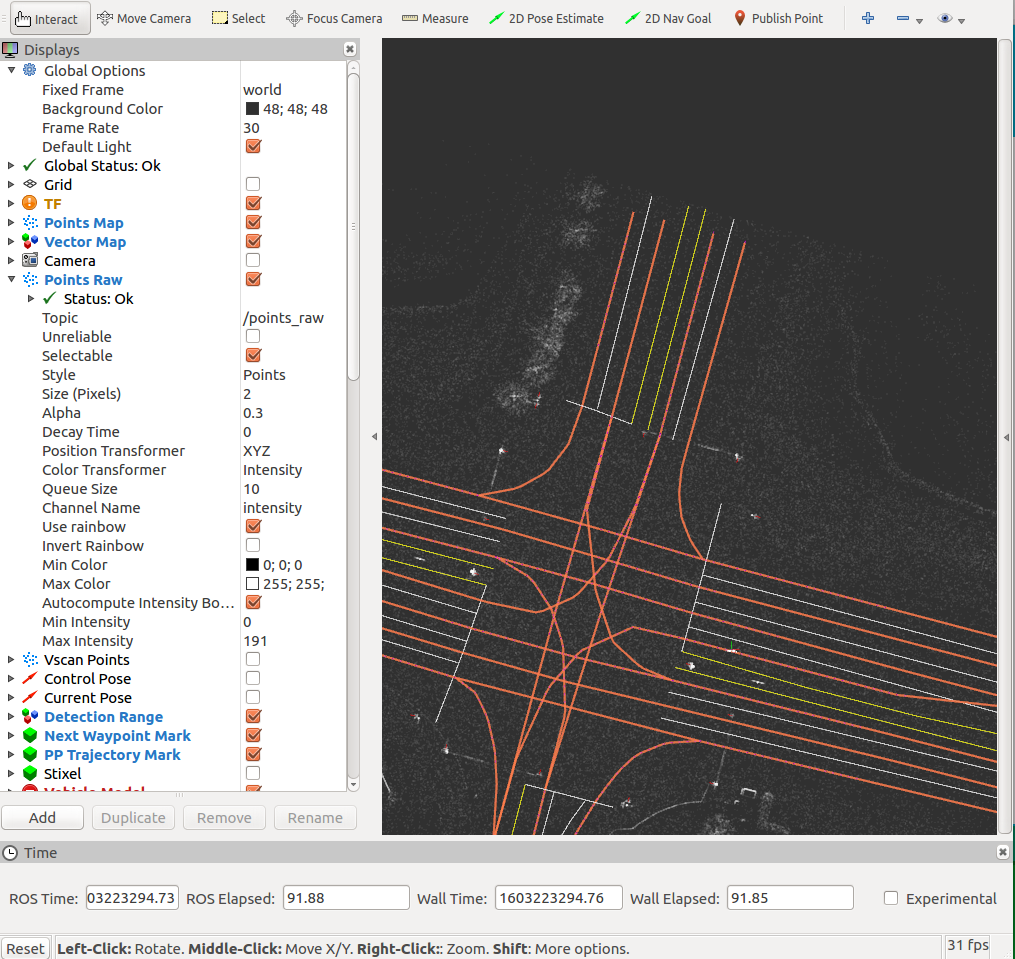
I was able to initiate the 2D pose estimate and then gave a 2D nav goal as shown in image below:
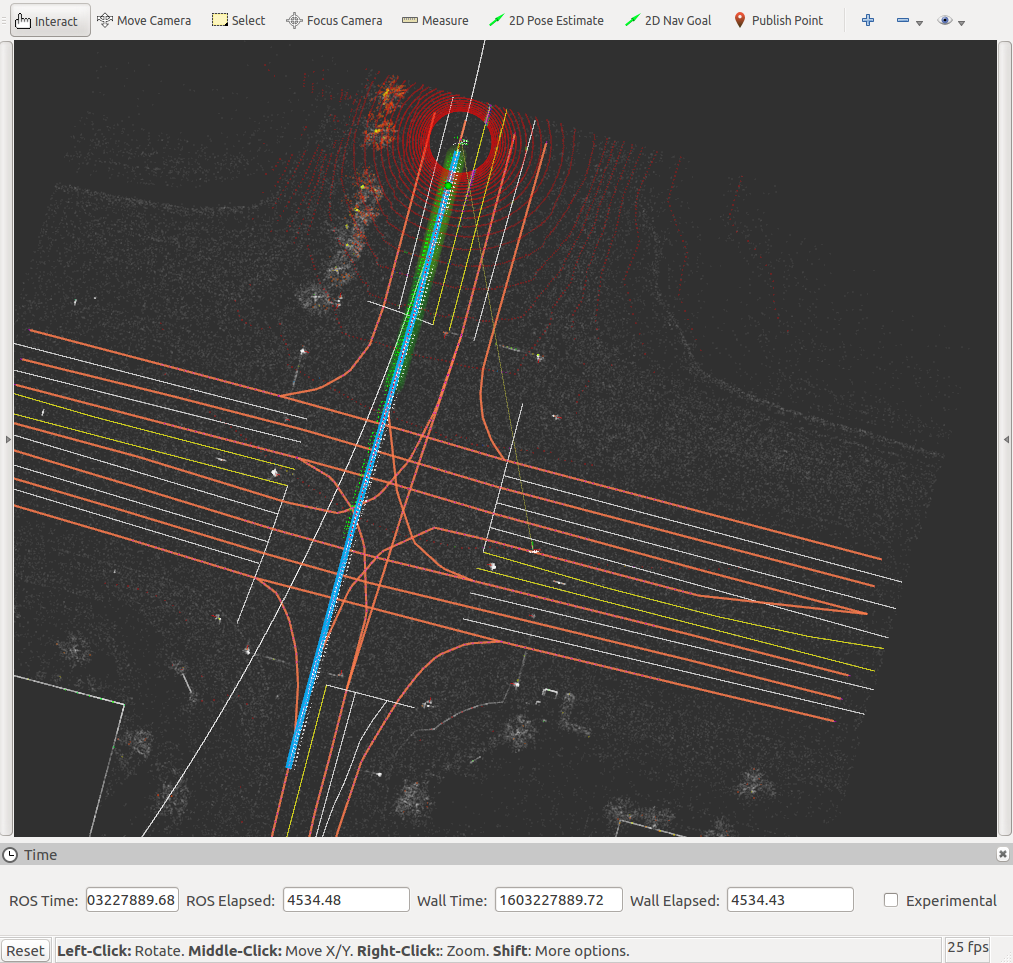
I have waited for 10 to 15 mins and the vehicle does not move at all.
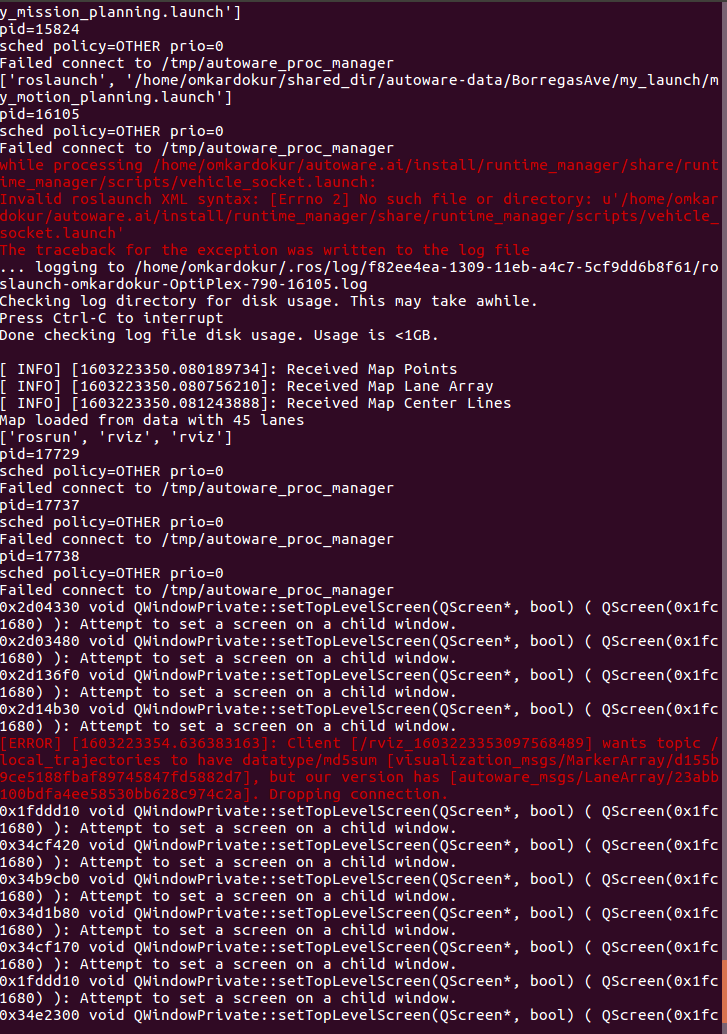
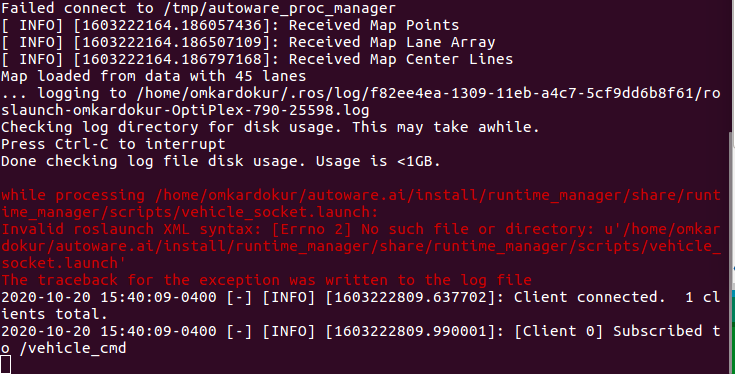
Here is the screenshot of the terminal with some failed messages.

Please help me if I am doing anything wrong here.
Thank you!
