
Help needed with Autoware Gazebo setup for MPC_follower

Hi Guys ,
1 week ago , i got started out with Autoware stack . I am fairly accustomed with the ROS ecosystem (have good experience with packages like move_base )
Any how , I am trying to get the Autoware Gazebo simulation to work with their planners .
I have already gone through the following link(s) and can now launch the Gazebo world with the vehicle (I am able to move the vehicle by publishing the Twist values )
- https://github.com/Autoware-AI/autoware.ai/wiki/Gazebo-Simulation-Start
- https://github.com/yukkysaito/vehicle_sim
- https://docs.wixstatic.com/ugd/984e93_b4e43111b1dd420cb3bc2c3e13071e71.pdf?index=true
- https://iseauto.ttu.ee/wp-content/uploads/2018/06/Mihkel_Vali_Multiple_lidar_analysis.pdf
- https://answers.ros.org/question/339239/using-autoware-mpc_follower/
Basically , Trying to run mpc_follower link , it takes the following inputs
input
/mpc_waypoints : reference waypoints (generated in mpc_waypoints_converter)
/current_pose : self pose
/vehicle_status : vehicle information (as velocity and steering angle source)
output
/twist_raw : command for vehicle
/ctrl_raw : command for vehicle
I have piped these inputs correctly(to the best of my knowledge ) , yet i am not seeing the twist values generated by this package I am confused !
If any of you know a detailed tutorial on how to get started with Autoware and Gazebo , please share !.
WHAT are the issues i am facing :
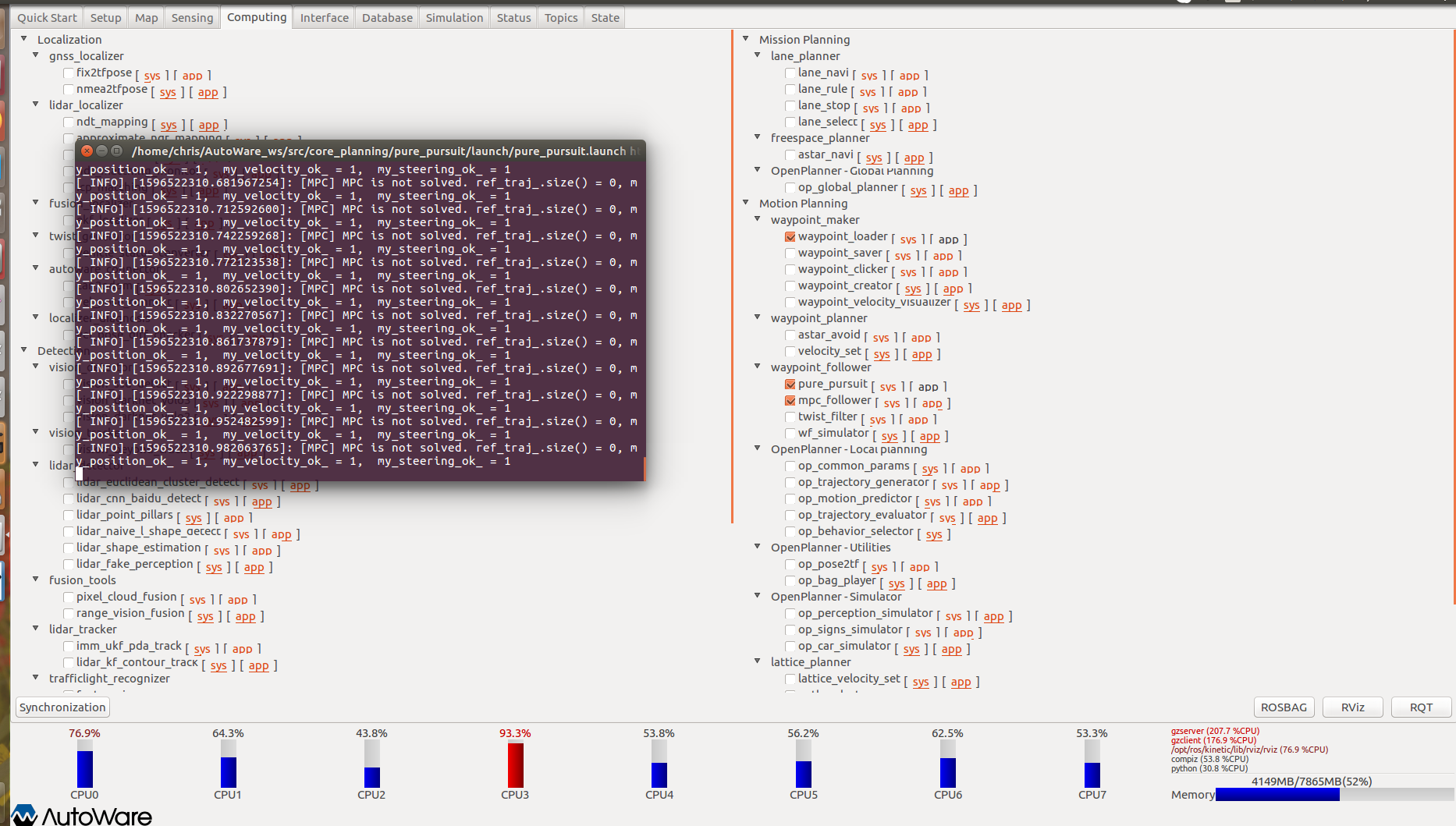
- Here's the log output : [ INFO] [1576075515.839709316]: [MPC] MPC is not solved. ref_traj_.size() = 0, my_position_ok_ = 1, my_velocity_ok_ = 0, my_steering_ok_ = 0

@TakaHoribe Can you help here?