
RealSense D435 FOV disceprancy of depth cloud and laser of depthimage_to_laserscan
Hello guys,
I am using an Intel Realsense D435 depth camera with the realsense2_camera package , converted the depth cloud to a laserscan via depthimage_to_laserscan package.
I launch the camera with
roslaunch realsense2_camera rs_camera.launch align_depth:=True
and the laserscan with
rosrun depthimage_to_laserscan depthimage_to_laserscan image:=/camera/aligned_depth_to_color/image_raw
to get the depth module aligned with the RGB module, so pixel XY in depth corresponds to the same pixel in RGB. When I show both the depth cloud and laserscan in rviz, there is a difference regarding the FOV. That difference happens when I choose the aligned_depth_to_color topic for the depth cloud display in rviz, but not when I use the regular depth topic, which is not aligned. According to Intel, the D435 has a horizontal FOV of approx. 87° for the depth module, which I can pretty much confirm for the first image below/aligned_depth_to_cloud. An echo to /scan topic shows me
angle_min: -0.473687112331
angle_max: 0.481075167656
which is approx. 54° in sum.
Its obviously logical, that the FOV decreases when it's aligned to the RGB module. But why is rviz showing me a wider FOV for the aligned topic and narrower for the not_aligned topic, it should be exactly the opposite??
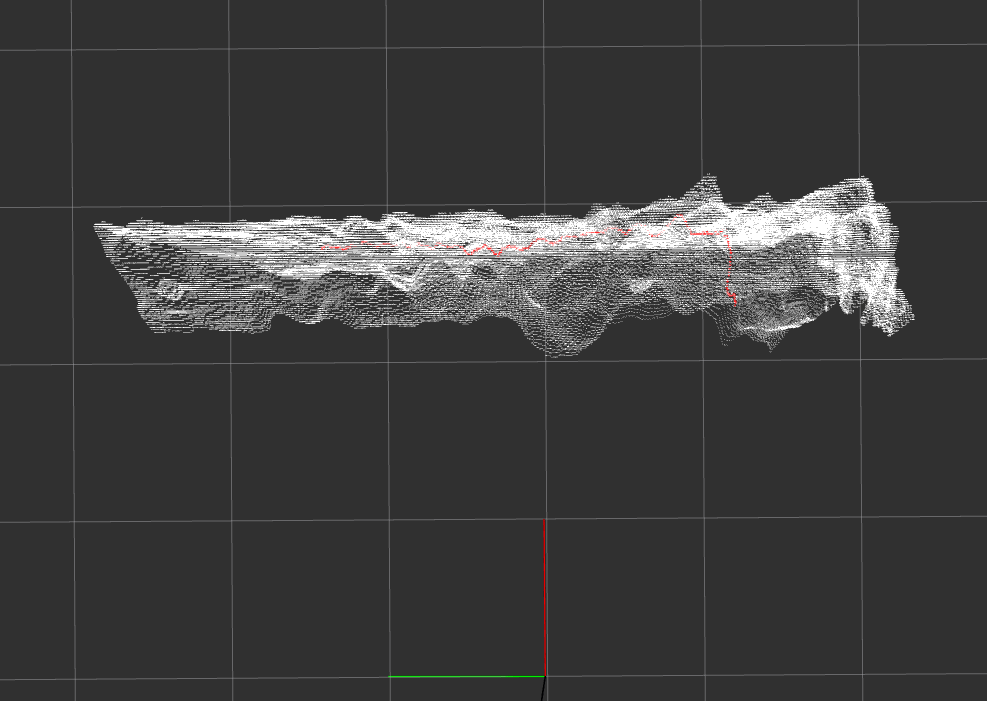
The first picture is depth aligned to color, where the depth cloud is clearly wider.
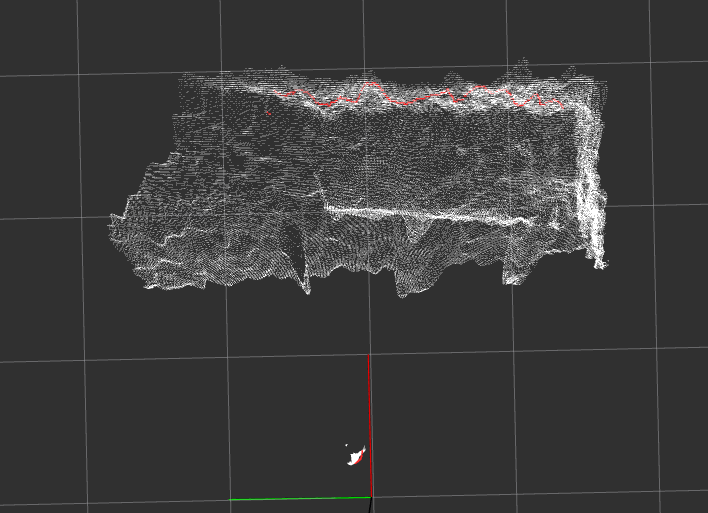
The second picture is not aligned; it isn't noticeable, but from a different angle you can see that they have the same width
Thx in advance

I have a similar problem. Did you manage to transform the "rosrun depthimage_to_laserscan depthimage_to_laserscan image: = / camera / aligned_depth_to_color / image_raw" into a launch file?