
auto docking example [closed]

Hello
what is the best way to build an auto docking system. Does anyone know any examples using infrared sensors?
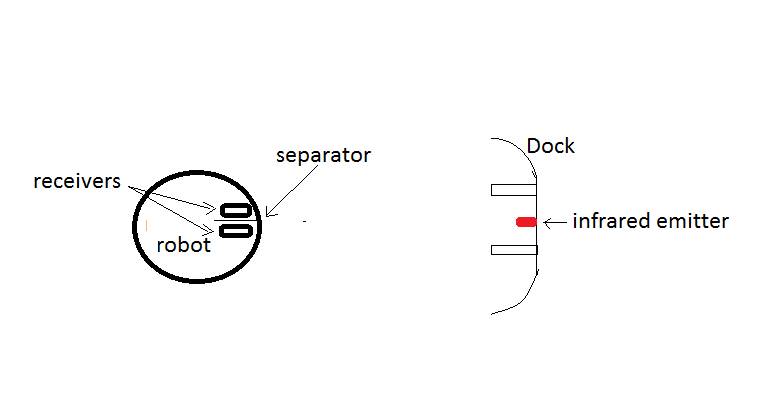
With a proportional follower system using one infrared emitter on the dock and two infrared receivers on the robot, would that be a good solution?
In the KoBuKi project, how are the left, right and central areas differentiated? Link KuboKi Project
thanks
Closed for the following reason
question is not relevant or outdated by
mateusguilherme
close date 2020-01-13 19:48:03.434454
add a comment
