
problems in understanding kinematics [closed]
Hi,
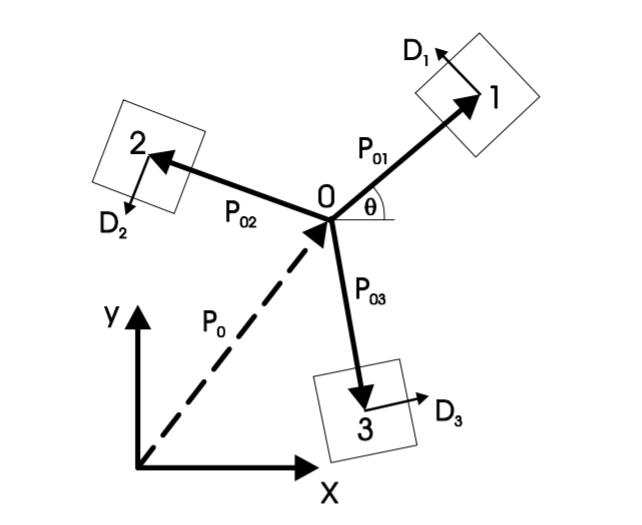
I tried to understand kinematics after having an omnidirectional roobt. Some problems stop me to go further. Here I upload some contents of different papers talking about kinematics.
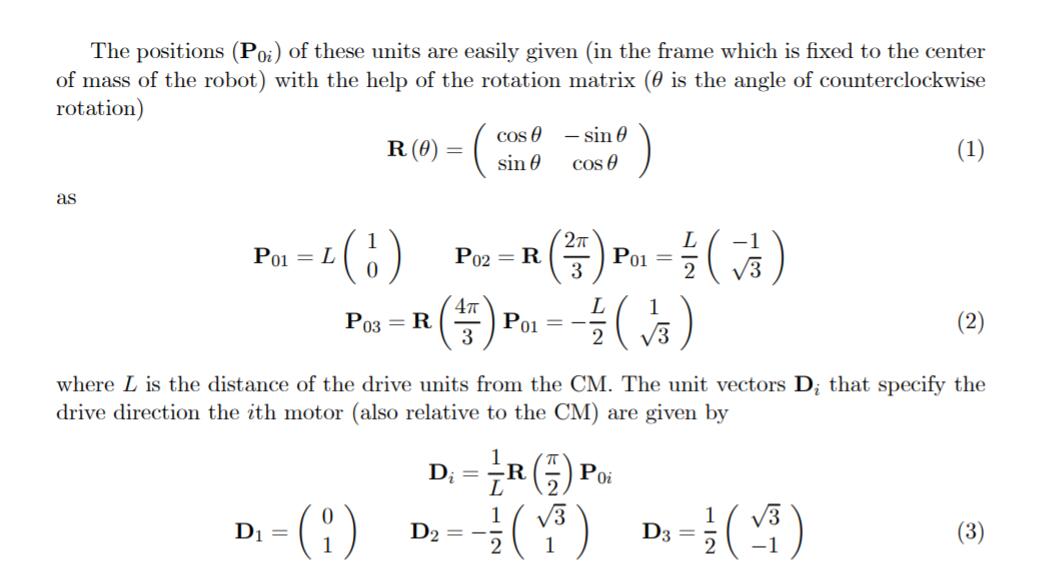
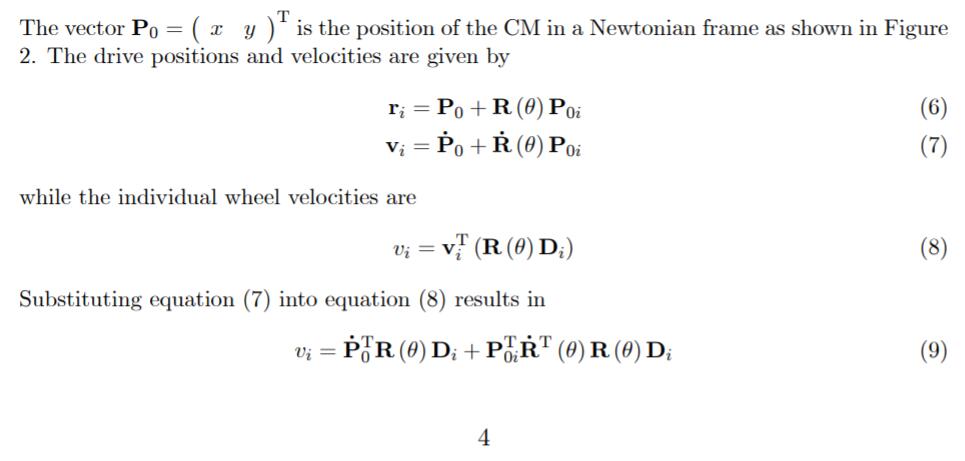
For the 1st three pictures, I don't know how equation (8) is from and I am little confused about translational and tangentianal velocities. I don't know why it mutiplys R(theta) again in equation (8).
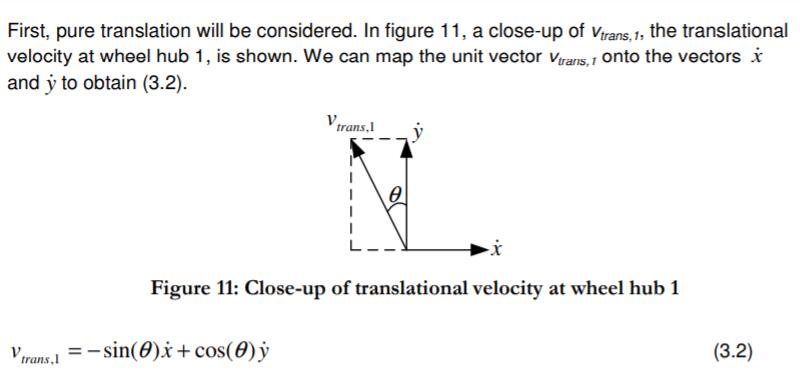
For the 2nd paper, I cannot obtain the equation of v_trans,i. Also, I am not sure if the rotation matrix in this case is R(theta) = [cos(theta) -sin(theta); sin(theta) cos(theta)]. Can anyone please tell some details about the kinematics.

As this is a forum dedicated to ROS support, I feel your question is too generic and therefore off-topic and I've closed it.
I would suggest you post it at a more appropriate forum, such as the Robotics StackExchange category.