
Point cloud axis offset [closed]
Hi, I used velodyne_driver and velodyne_pointcloud to convert the pcap files into pointcloud2 format and visualize them in rviz.I found that the axis of VeloView is somewhat different from that of rviz, the rviz axis appears to rotate 90° counterclockwise compared to the VeloView axis. What reason is this?
These are my specific steps, and they all run in separate terminals.
roscore
rosrun velodyne_driver velodyne_node _model:=VLP16 _pcap:=my.pcap _read_once:=true
rosrun nodelet nodelet standalone velodyne_pointcloud/CloudNodelet _calibration:=VLP-16.yaml
rosrun rviz rviz
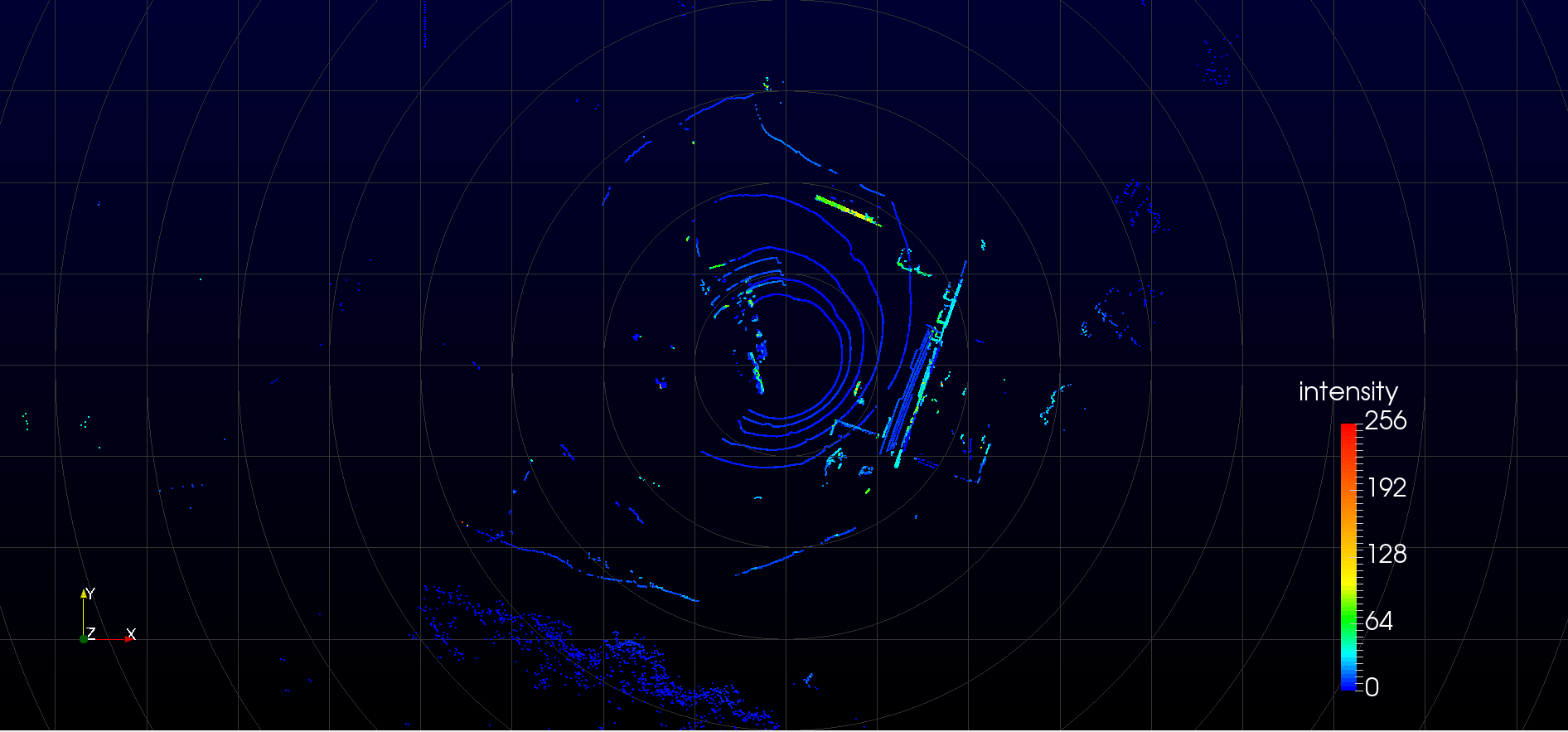
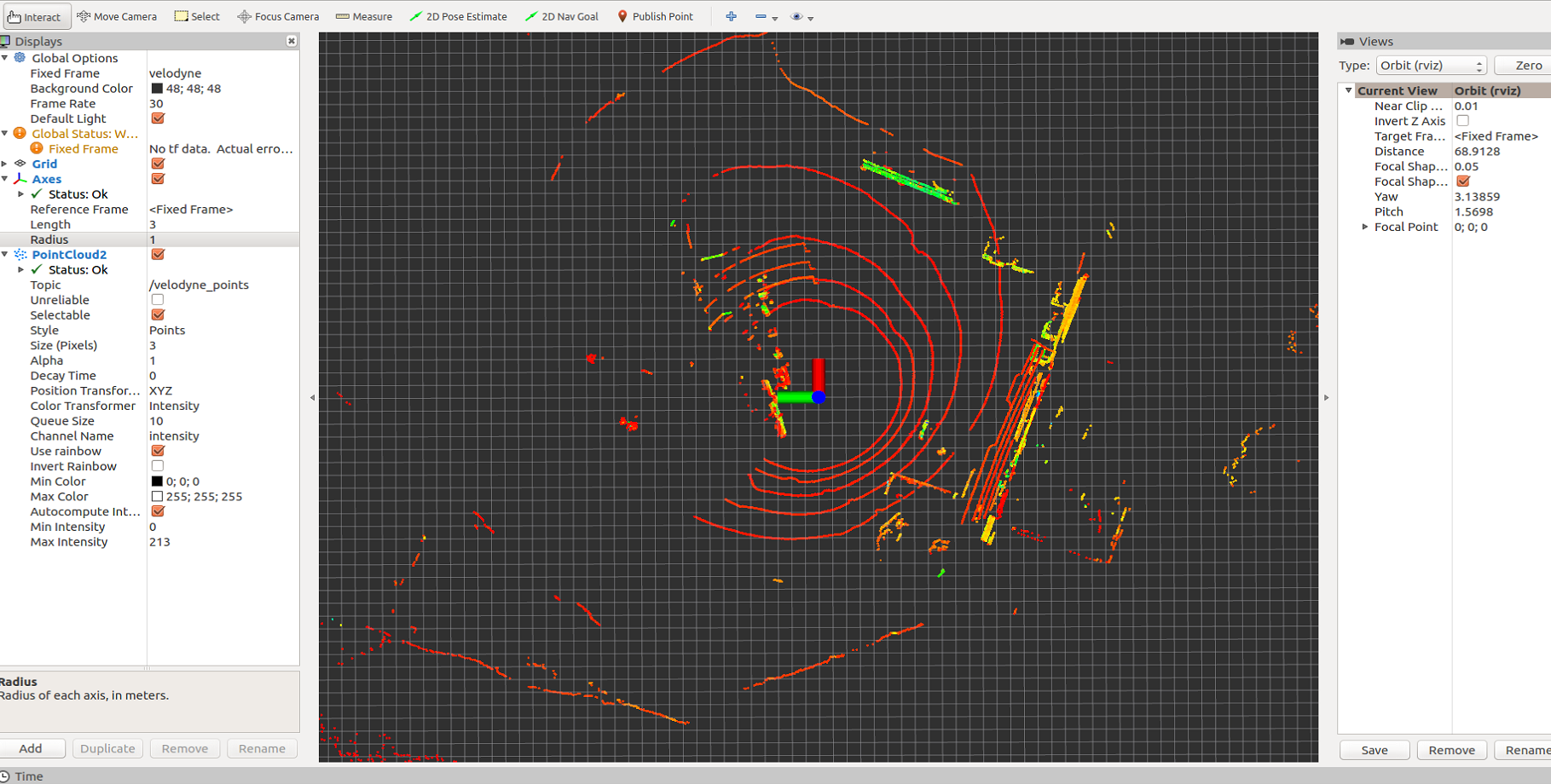
Here are two screenshots of the point cloud at the same time,screenshots show the plane XOY and the z-axis outward.
Thanks in advance!

Maybe I didn't make myself clear. I have a pcap file that is collected by velodyne VLP16 lidar, and I put it in VeloView and rviz for visualization. However, the coordinate system displayed by the two tools is different. The image displayed in rviz appears to rotate the Z axis counterclockwise in the VeloView by 90°. If I keep the point cloud the same relative to the shape I see, the positive X axis in the VeloView becomes the negative Y axis in rviz. I tried to upload their screenshots, but I don't know why it didn't work, which is too bad.
There is karma limit (20 karma I think) for uploading screenshots. I up-voted your question to give you some. In the meanwhile you can temporary use http://imgur.com/ for example to link your screenshots.
Also in which frame is the velodyne_driver publishing packets and in which frame are you visualizing it in RViz?
RViz frames are x-forward, y-left and z-up
On another point, I dont see any VLP-16.yaml calibration config in the git. Maybe try using VLP16db.yaml instead.
Thanks for your help! The screenshot has been uploaded, and my yaml file is generated by myself with VLP-16.xml, the content is the same as vlp16db.yaml, It won't be a problem.
Well it looks fine. Separate systems use different coordinate frames to represent data. What particular problem are you facing in your case?