
openrave does not show properly the robot model

Hello developers! I'm working with manipulator-H and I'm trying to use IKFast.
I followed this tutorial to install all the system dependecies and programs: installation tutorial and I followed this tutorial from MoveIt! to run the openrave (process to convert xacro -> urdf -> collada): moveit tutorial.
I'm getting this situation when I runopenrave manipulator_h.dae in terminal:
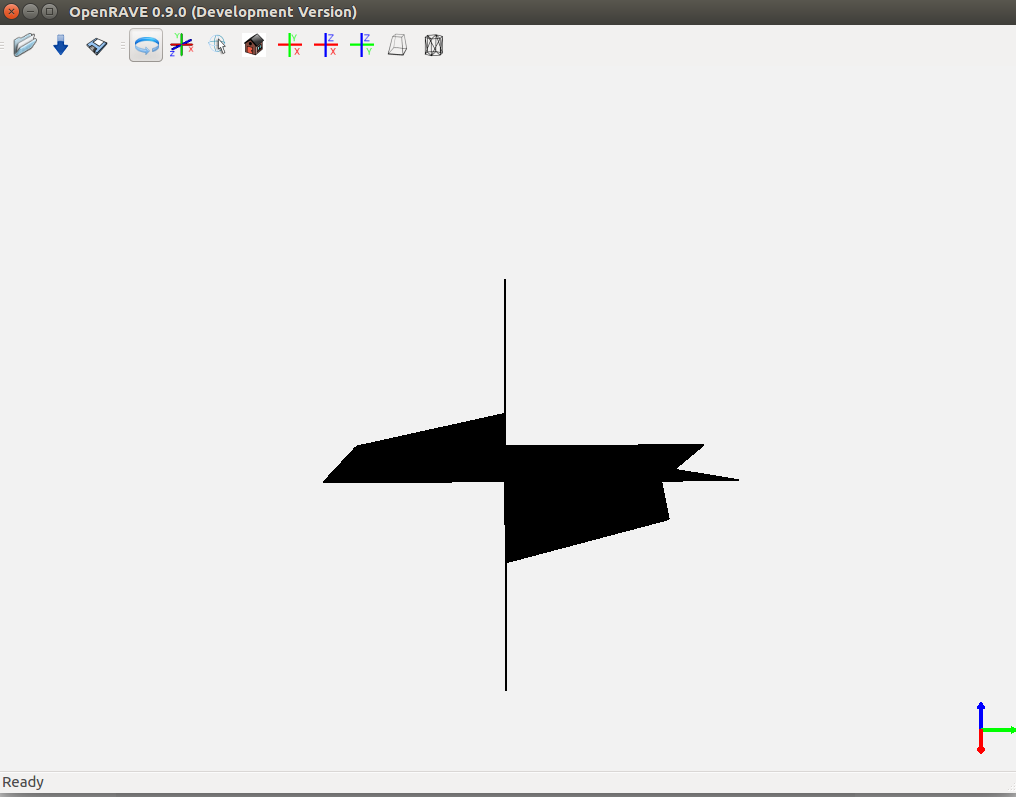
In terminal is shown those warnings:
2019-08-27 10:41:08,124 openrave [WARN] [fclspace.h:248 FCLSpace::KinBodyInfoPtr fclrave::FCLSpace::InitKinBody] Initializing link robotis_manipulator_h/world with 0 geometries (env 1) (userdatakey fclcollision0x1b18470)
2019-08-27 10:41:08,181 openrave [WARN] [fclspace.h:248 FCLSpace::KinBodyInfoPtr fclrave::FCLSpace::InitKinBody] Initializing link robotis_manipulator_h/world with 0 geometries (env 1) (userdatakey fclcollision0x1b18470)
So what I'm getting wrong? One thing to note is that this ROBOTIS model only have a .xacro and not a .urdf.xacro file. This could be the reason?
add a comment
