
MoveIt! Setup Assistant parallel robot
Hi,
Please zoom the webpage to see the image clearly or else please visit this link.
I am trying to understand moveit package. Currently i have a simple four bar mechanism with 4 links
1. base link - active joint and can be rotate about y-axis
2. link1 - active joint and can be rotated about x-axis
3. link2 : mimics the link1
4. link3: mimic the link1 but in opposite direction to stay horizontal all the time.
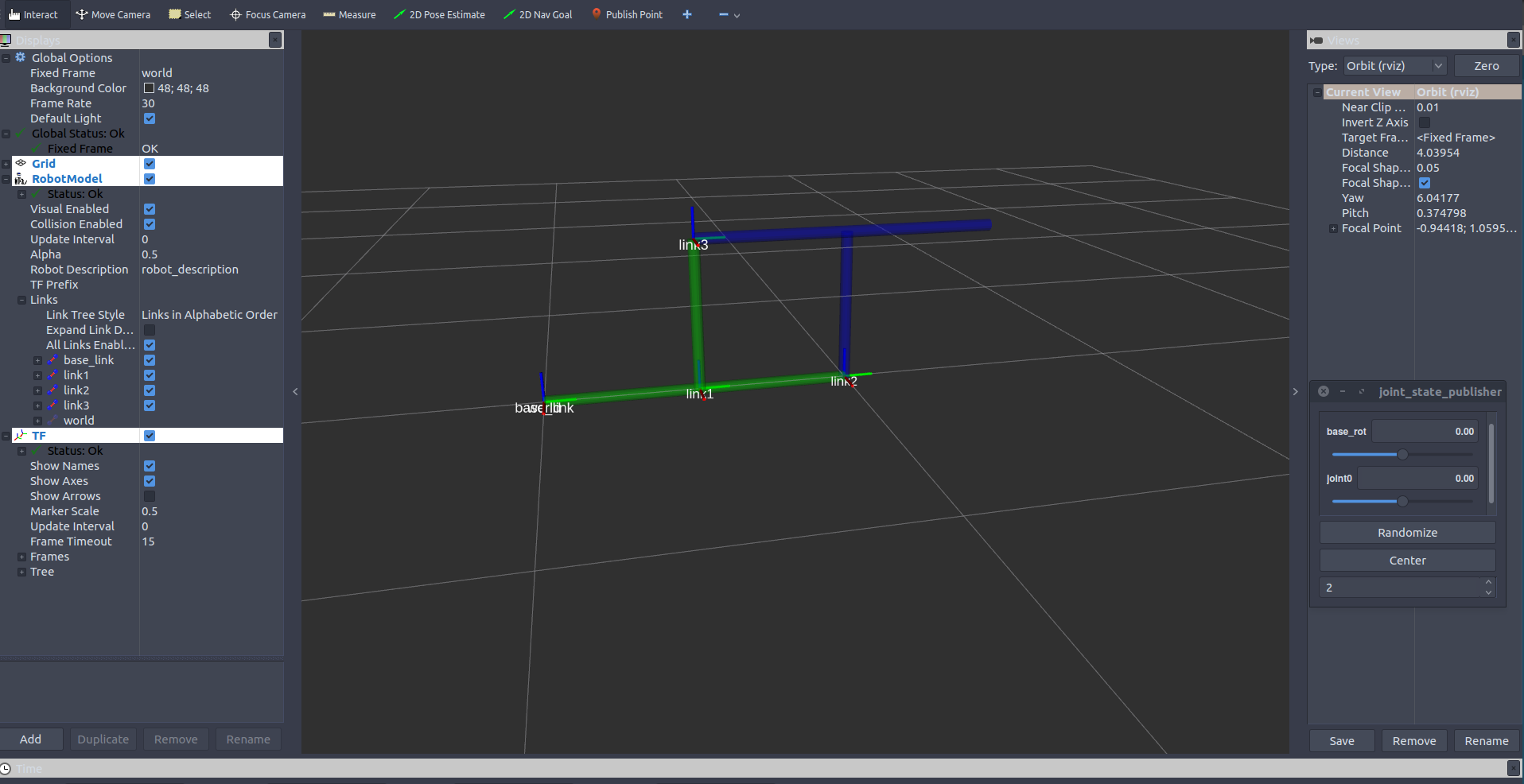
The visualization works as expected.
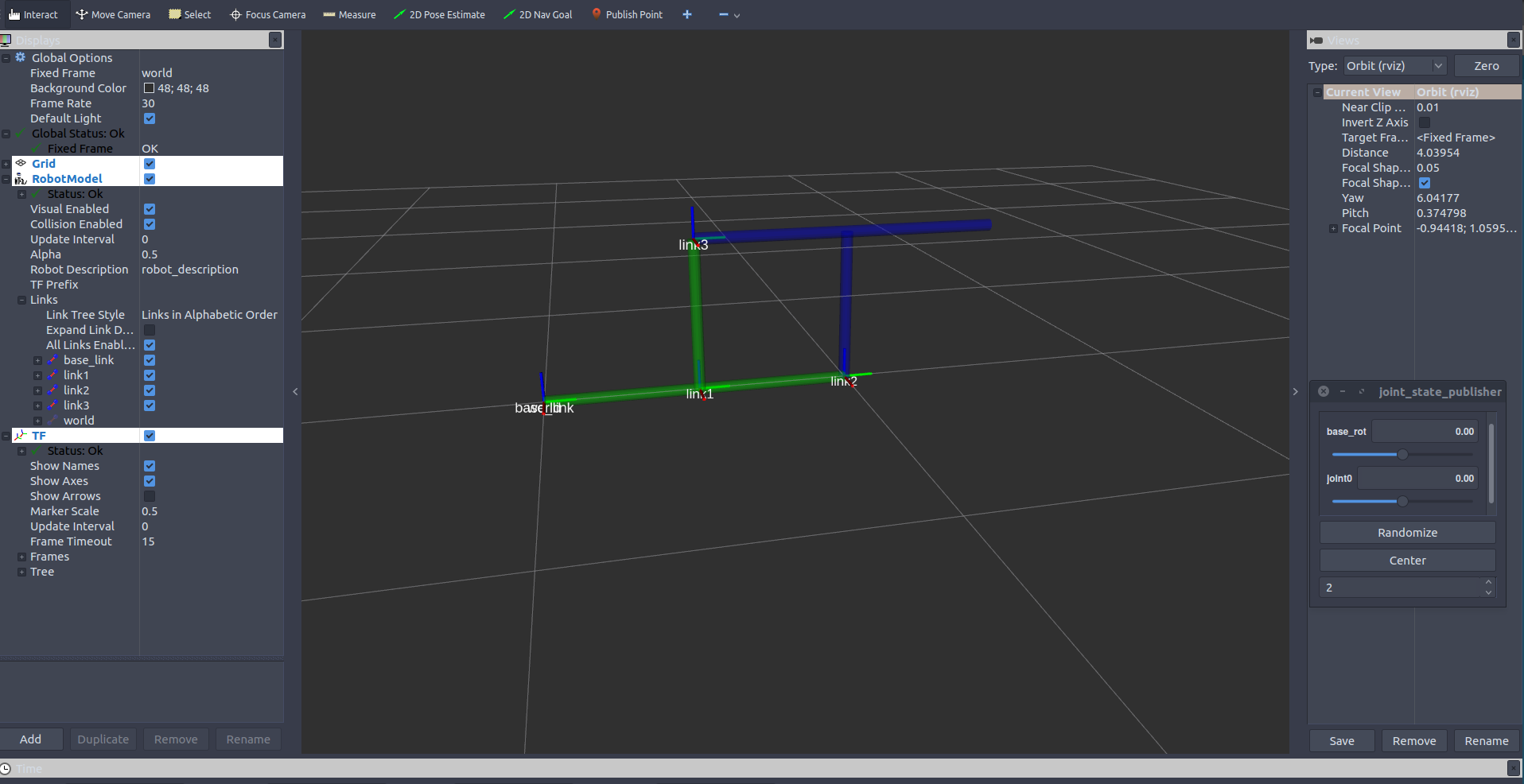
I am interested in position control of the link3(top, horizontal, blue color ) right most end point. I am following Moveit! Setup Assistant tutorial.
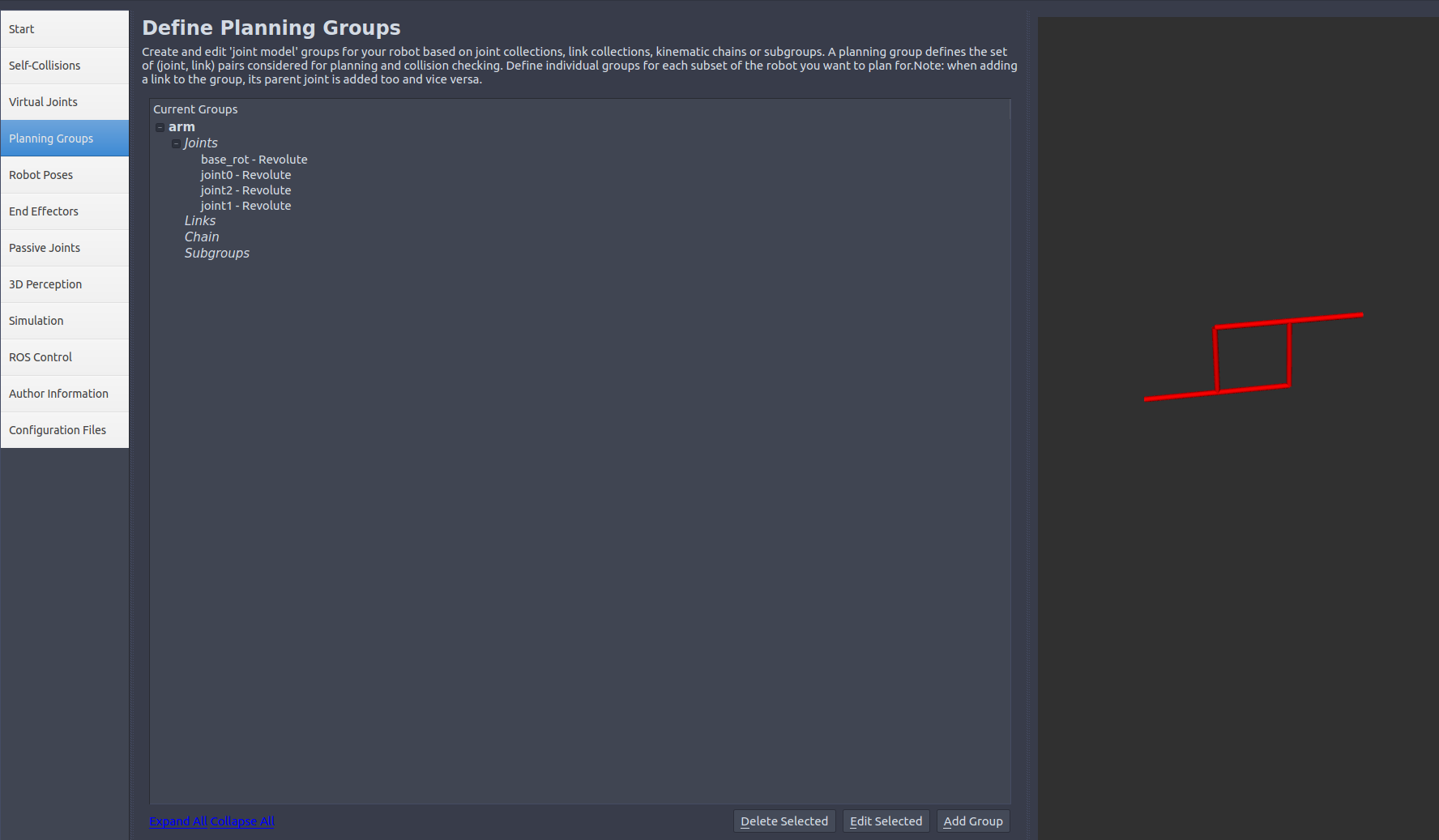
In "Add Planning group: " I created a group 'arm' and added all the joints except for the virtual joint that connects the world.
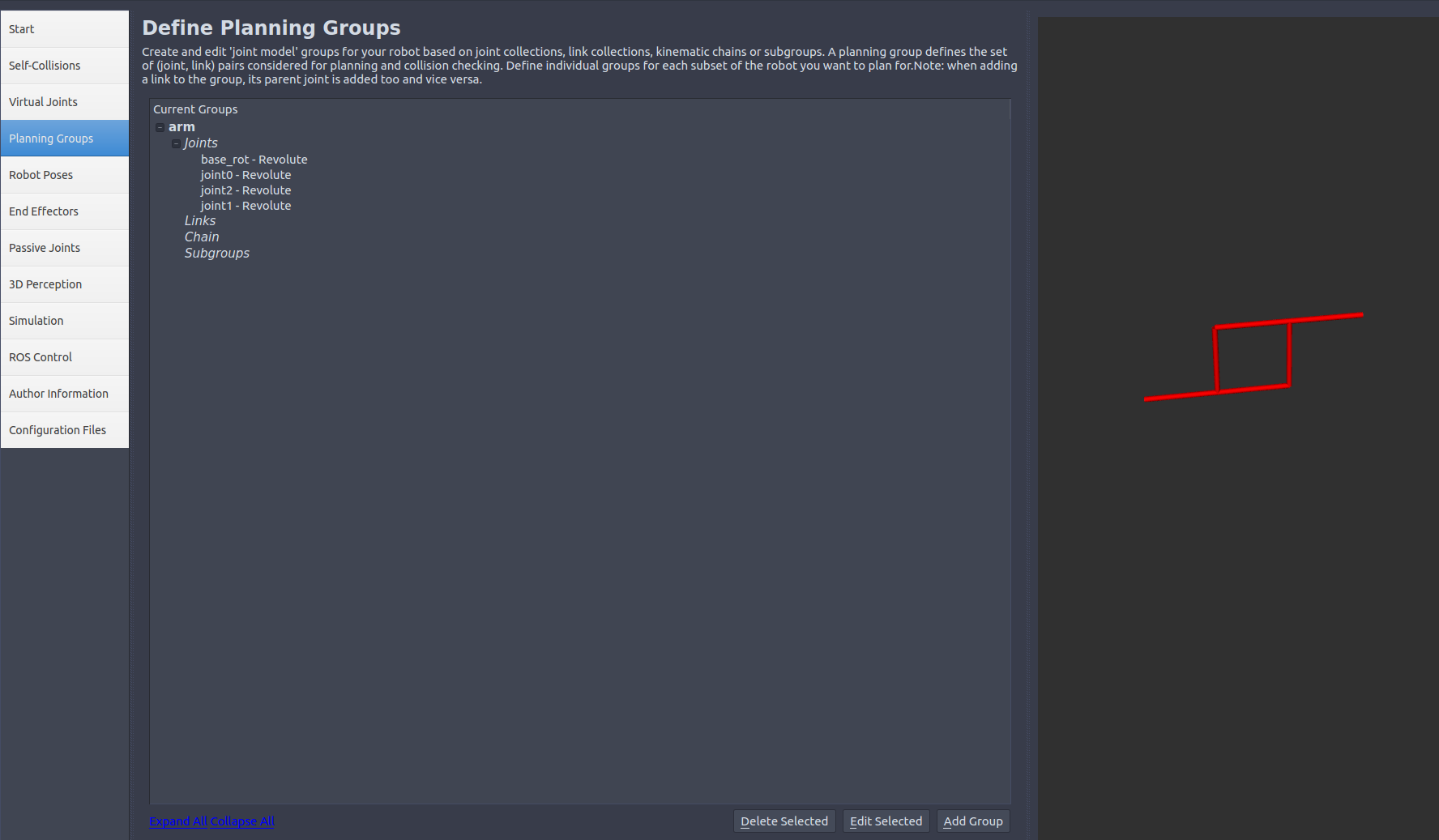
No passive joint were added.
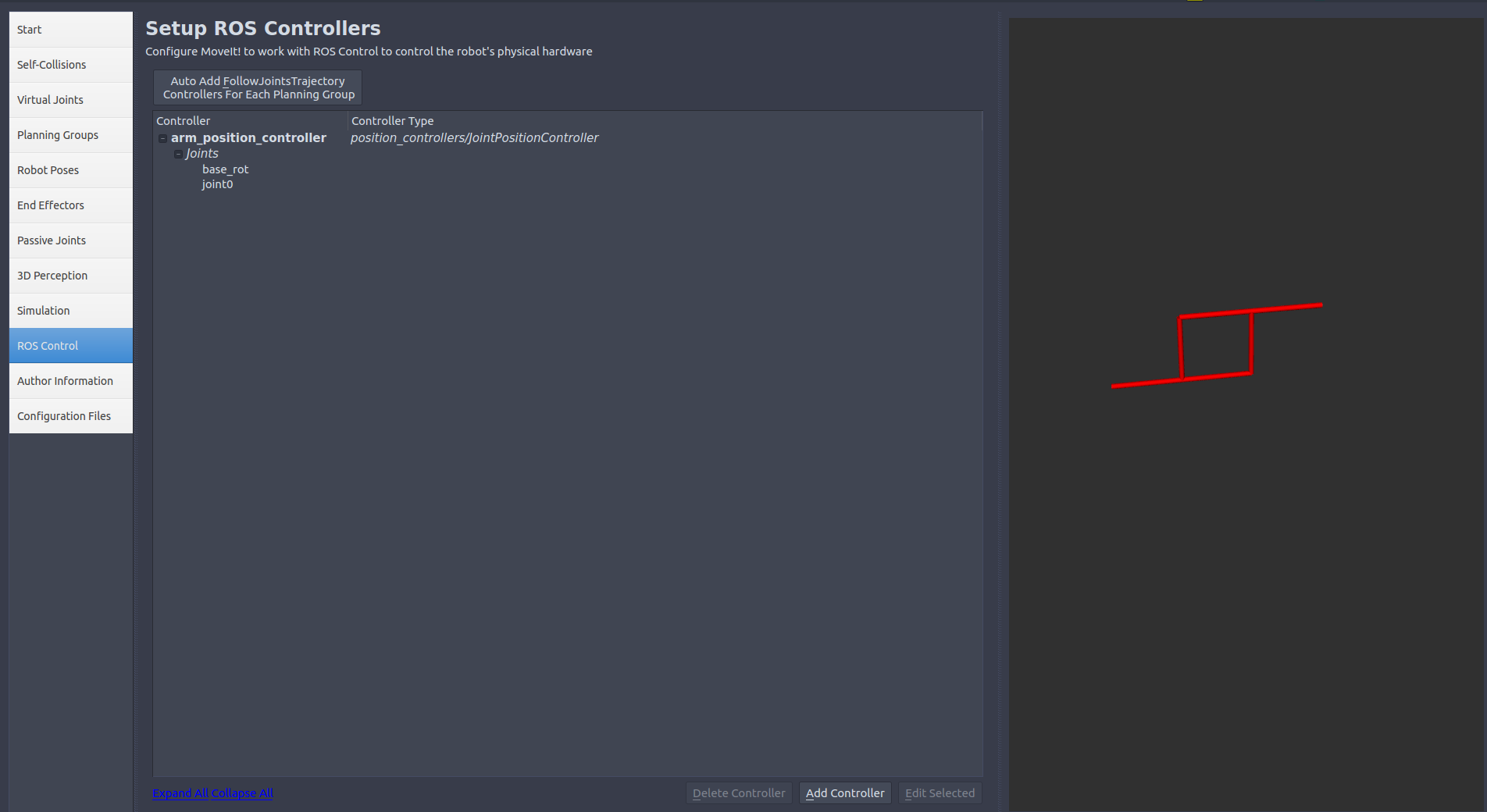
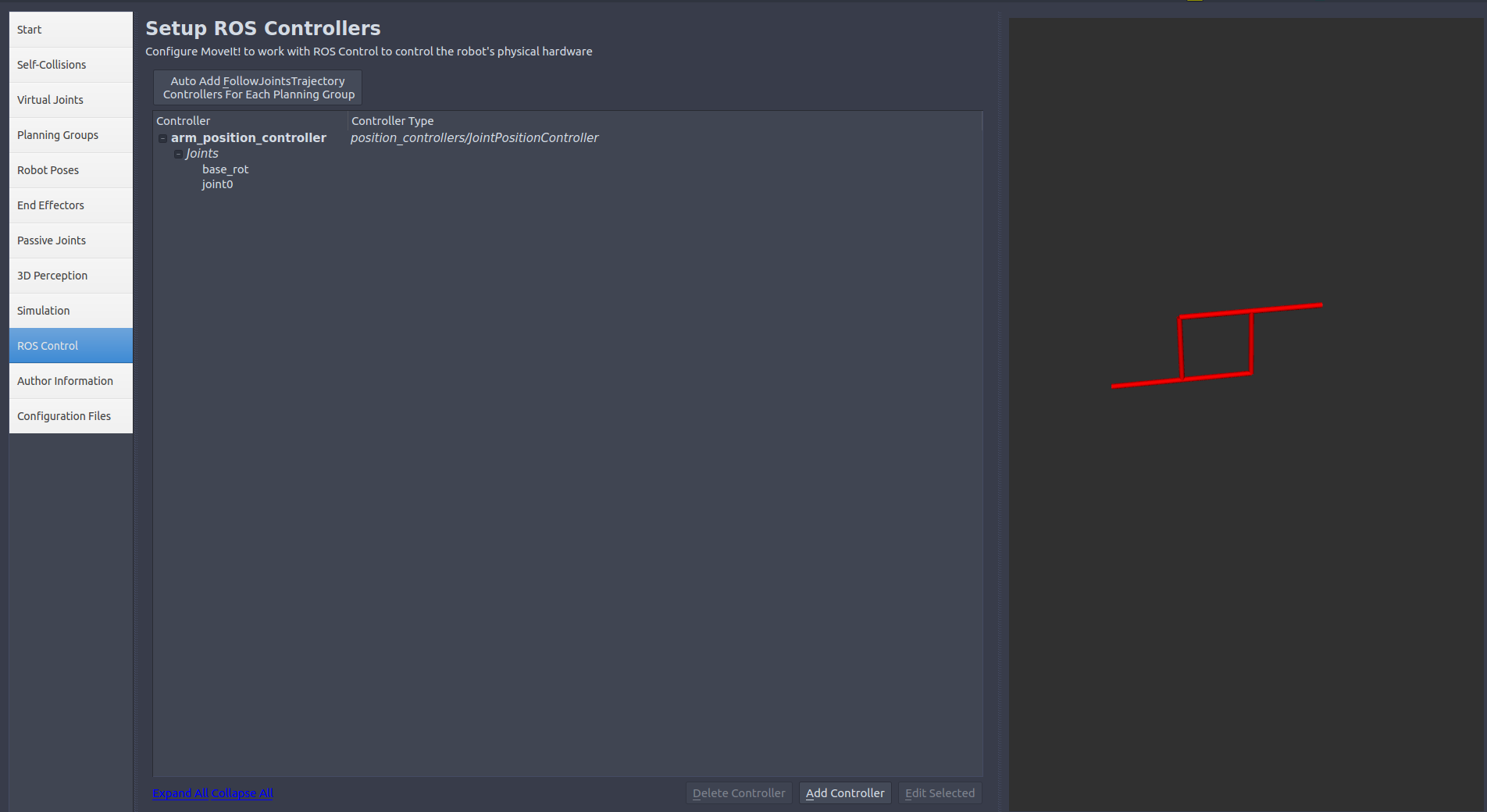
Then i created a ros controller with all the joints and moveit is wise enough to remove mimic joints from the position controller.
After creating the config files and launching demo.launch.

These are the error i received.
[ERROR] [1542216768.587967338]: Group 'arm' is not a chain
[ERROR] [1542216768.587992079]: Kinematics solver of type 'kdl_kinematics_plugin/KDLKinematicsPlugin' could not be initialized for group 'arm'
[ERROR] [1542216768.588105565]: Kinematics solver could not be instantiated for joint group arm.
[ERROR] [1542216768.618585152]: No sensor plugin specified for octomap updater 0; ignoring
[ERROR] [1542216768.657508087]: Could not find the planner configuration 'None' on the param server
There is also no visualization marker displayed to click and drag for planning. In case if i had to write custom IK solver please point me to some tutorials.
Any help is greatly appreciate.

{kind=link}
{kind=link}
{kind=link}
Have you solved this problem?I have the same troubles as you.