
What is the problem with my odom fixed frame
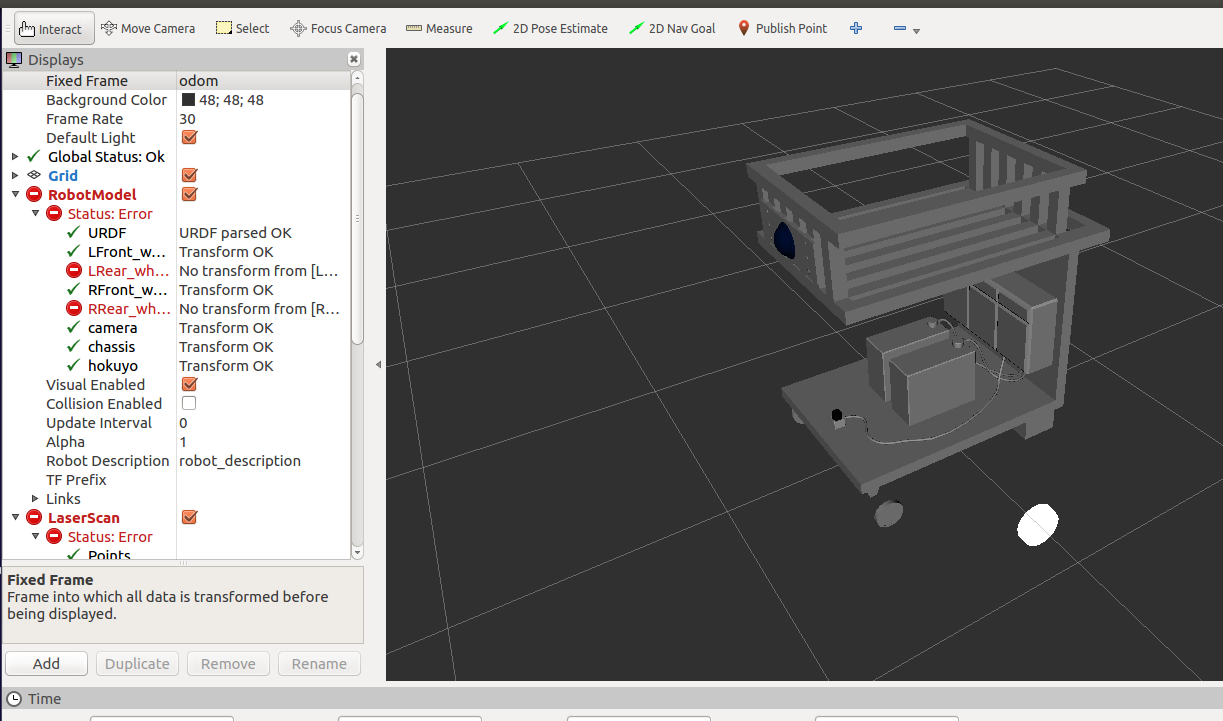
Hi everybody, As I was exploring some tutorials in the internet, I encountered an issue that is: Why my odom fixed frame act strangely when I load it with Rviz and how can I fix it ... I understand that odom frame is supposed to be like a wrapper that wraps all robots main components and through it we can exchange messages with the robot ... but that is not what I get when I launch my Rviz!
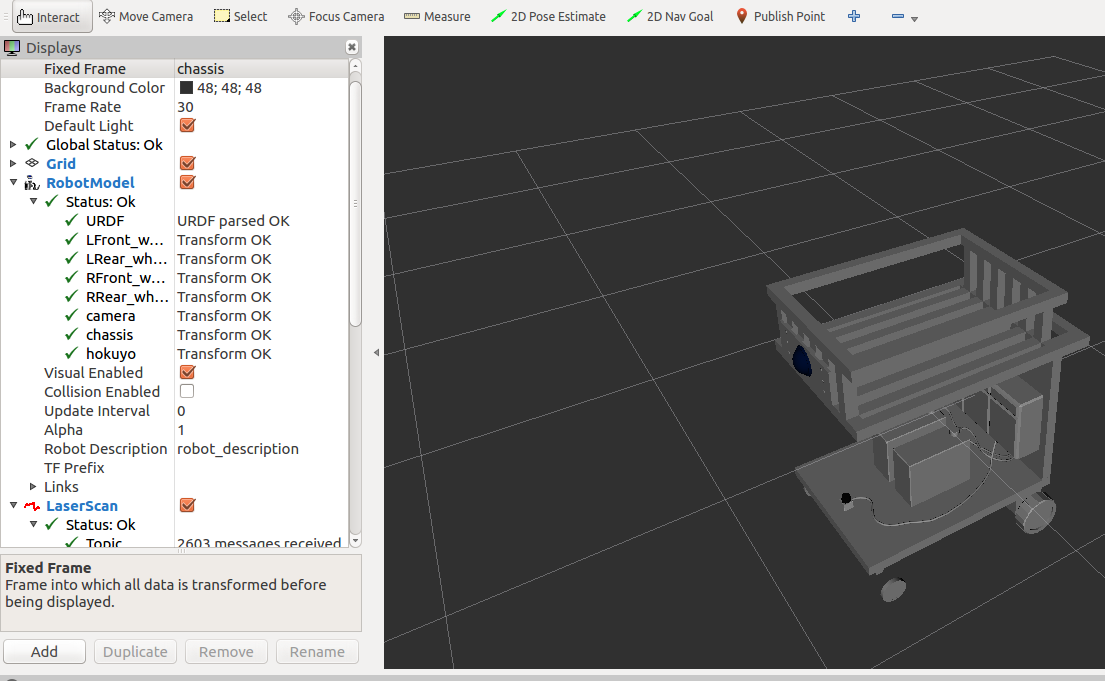
however, only when I select chassis frame, things seem to work as they supposed to be! except that the center of the robot as a whole, is the center of the 3D chassis model
this is my transform tree:

Can anybody help me with this issue?
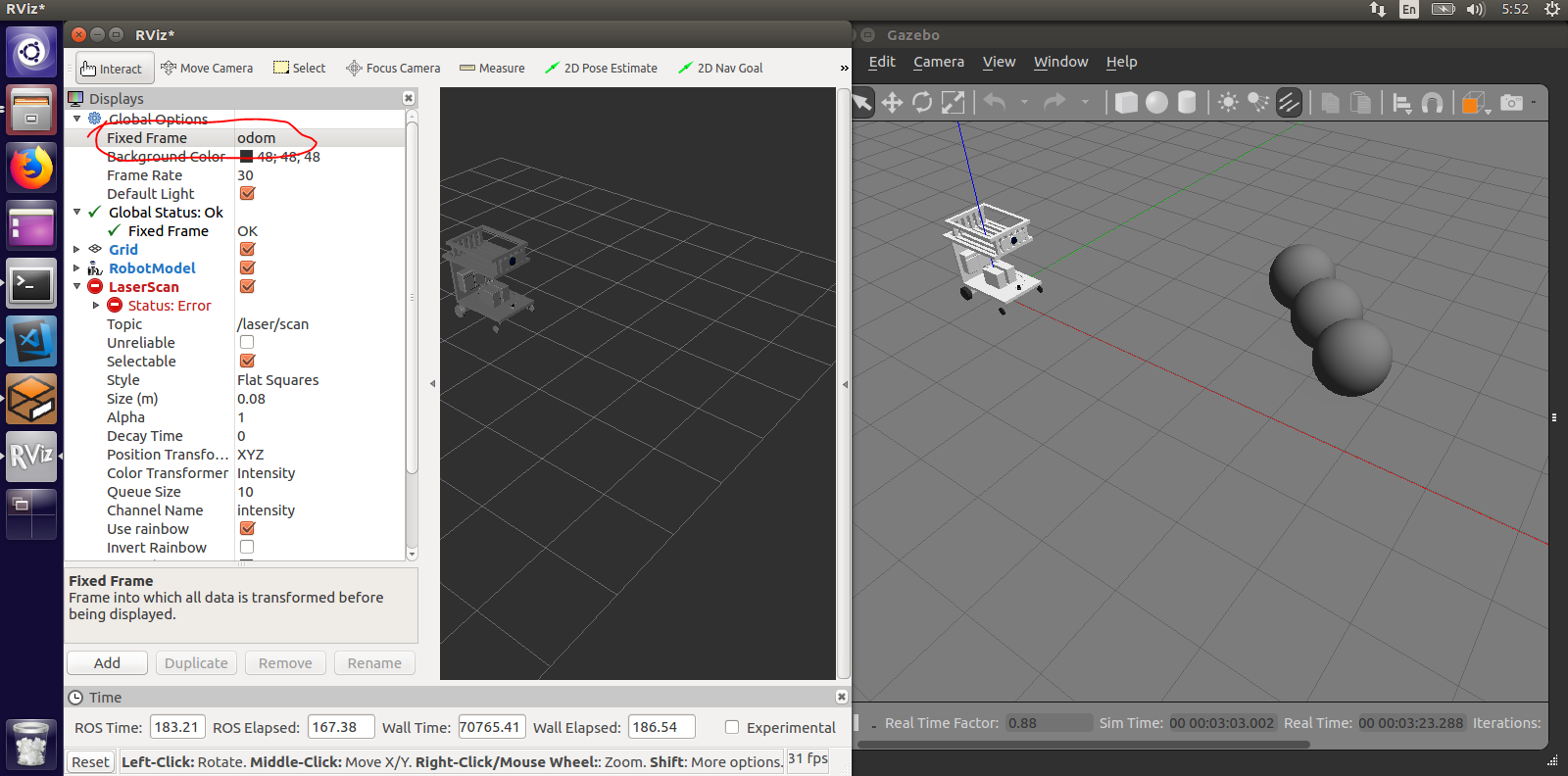
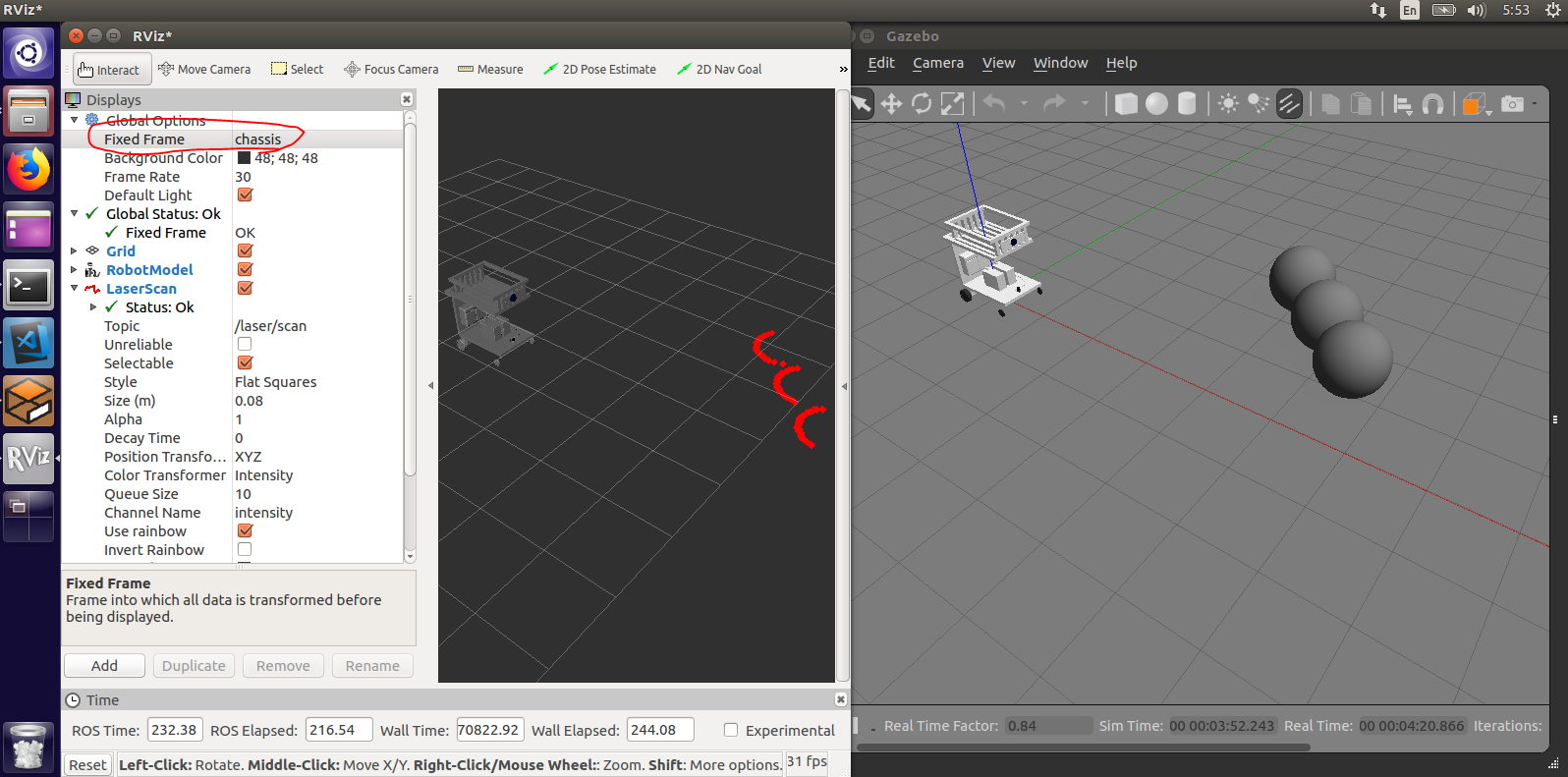
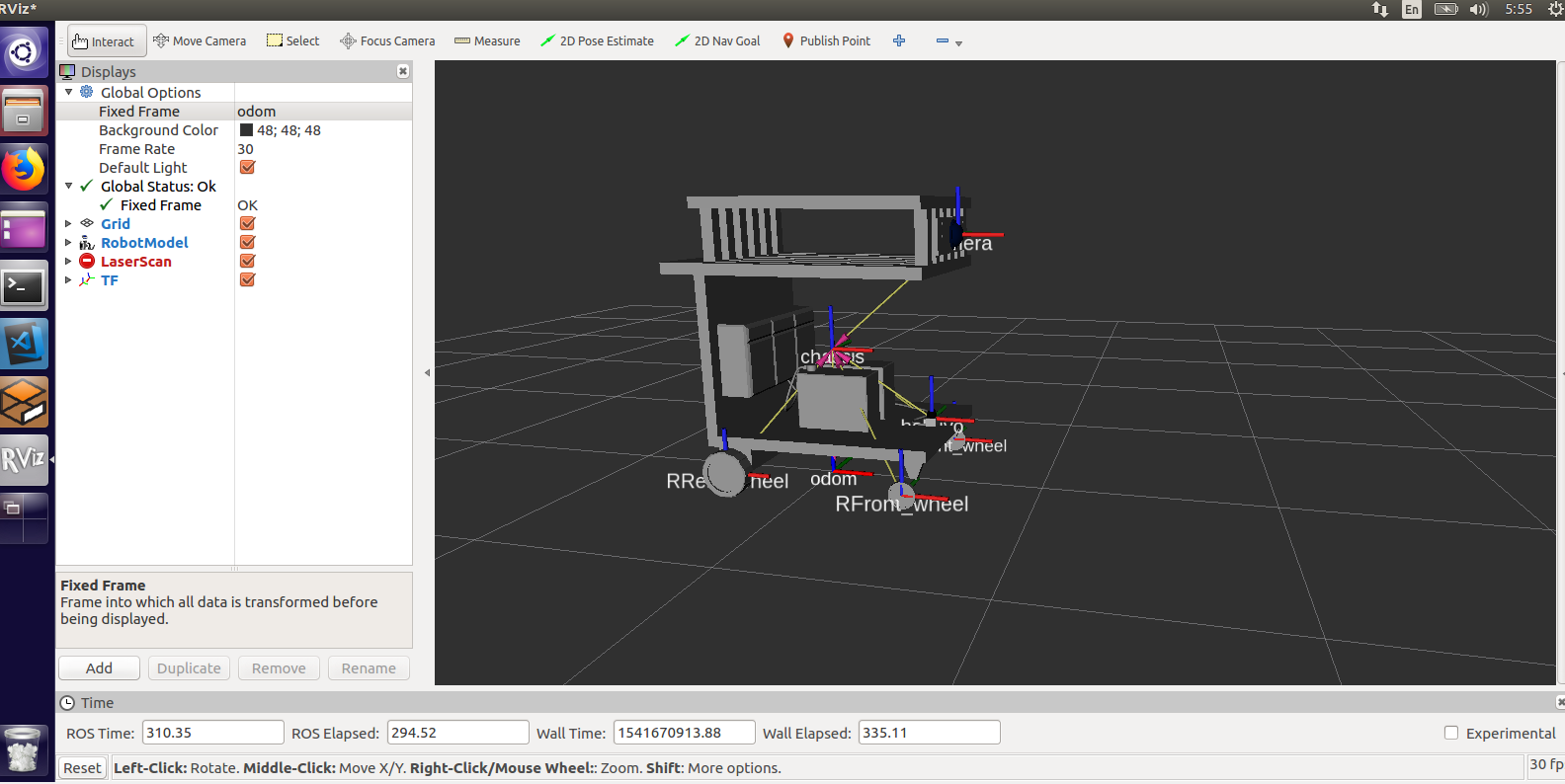
Here are more pictures (see how when the fixed frame is odom, I won't be able to read my laser sensor .. the reading only shows if it was chassis, or hokuyo):
This is my tf, which illustrats how everythigs are attached to the chassis which attached to odom ...
these are my plugins:
<gazebo reference="hokuyo">
<sensor type="gpu_ray" name="head_hokuyo_sensor">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>40</update_rate>
<ray>
<scan>
<horizontal>
<samples>720</samples>
<resolution>1</resolution>
<min_angle>-2.35619</min_angle>
<max_angle>2.35619</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_gpu_laser.so">
<topicName>/laser/scan</topicName>
<frameName>hokuyo</frameName>
</plugin>
</sensor>
</gazebo>
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<legacyMode>false</legacyMode>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<leftJoint>LRear_wheel_hinge</leftJoint>
<rightJoint>RRear_wheel_hinge</rightJoint>
<wheelSeparation>0.4</wheelSeparation>
<wheelDiameter>0.2</wheelDiameter>
<torque>10</torque>
<commandTopic>cmd_vel</commandTopic>
<odometryTopic>odom</odometryTopic>
<odometryFrame>odom</odometryFrame>
<robotBaseFrame>chassis</robotBaseFrame>
</plugin>
</gazebo>


Please attach all your images directly to your question. I've given you enough karma for that.
Links to google driver/dropbox/imgur/
<insert random other image host>won't work.Thank you so much @gvdhoorn ... I have edited as you suggested ..
I have the exact same problem...were you able to solve it?
Thank you in advance.