
[Kinetic] mapping is inaccurate
Hi all I created my own launch file for gmapping however the map generated in RVIZ is really inaccurate compared to the Gazebo world. Is there any solution to this? My robot's speed was at 10 on the keyboard teleop and rotation was done in slow movements. My launch file codes are as follows:
File: my_gmapping_launch.launch
<launch>
<arg name="scan_topic" default="scan" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<rosparam file="$(find my_mapping_launcher)/params/gmapping_params.yaml" command="load" />
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
File: gmapping_params.yaml
base_frame: base_footprint
odom_frame: odom
map_update_interval: 5.0
maxUrange: 6.0
maxRange: 8.0
minimumScore: 200
linearUpdate: 0.1
angularUpdate: 0.1
temporalUpdate: -1.0
resampleThreshold: 0.5
particles: 80
lskip: 10
xmin: -10
ymin: -10
xmax: 10
ymax: 10
delta: 0.05
llsamplerange: 0.01
llsamplestep: 0.01
lasamplerange: 0.005
lasamplestep: 0.005
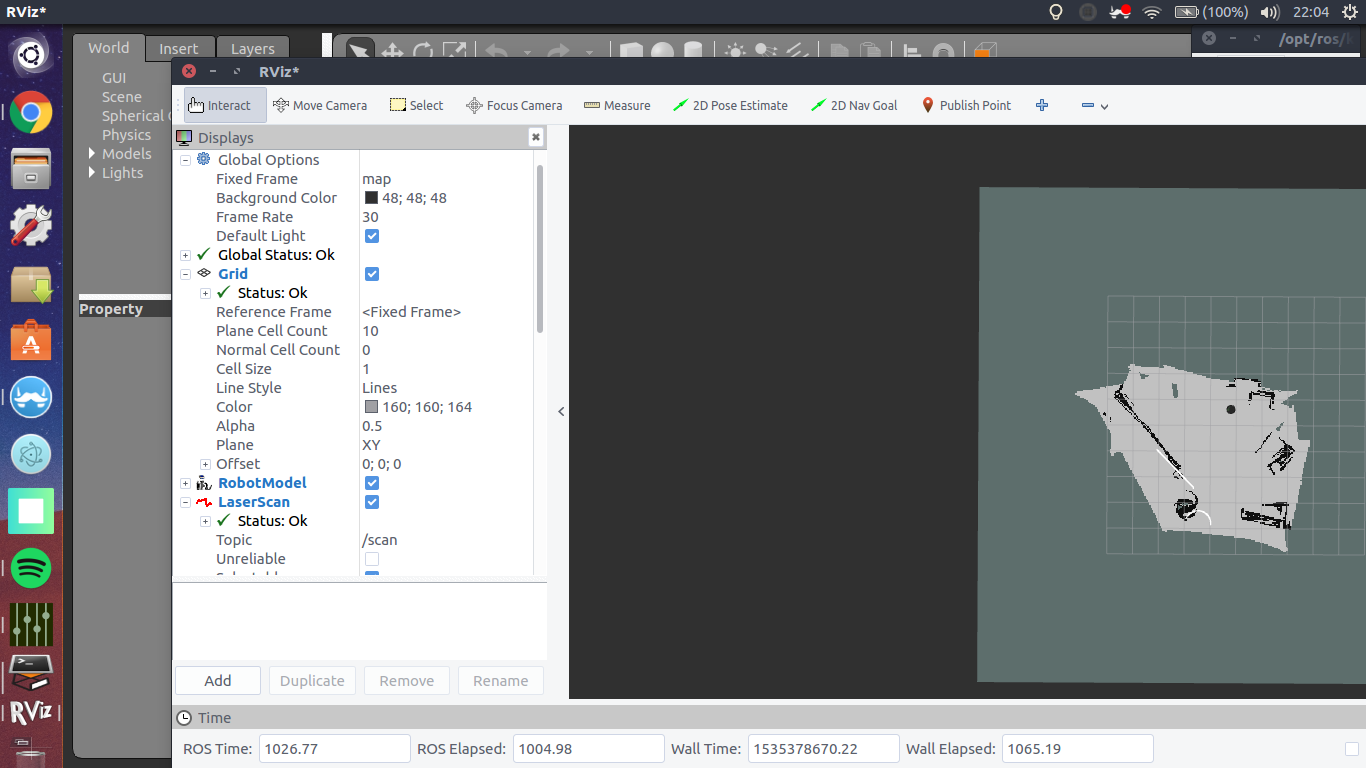
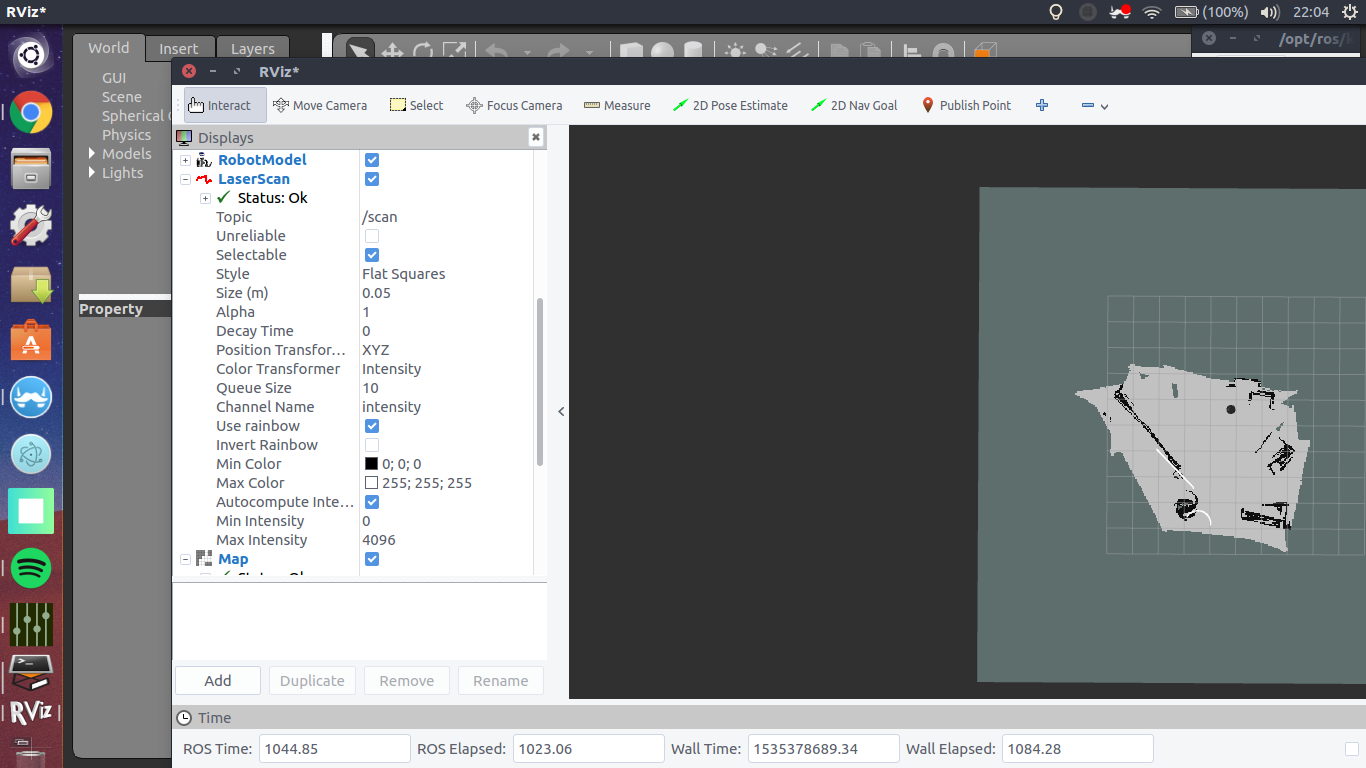
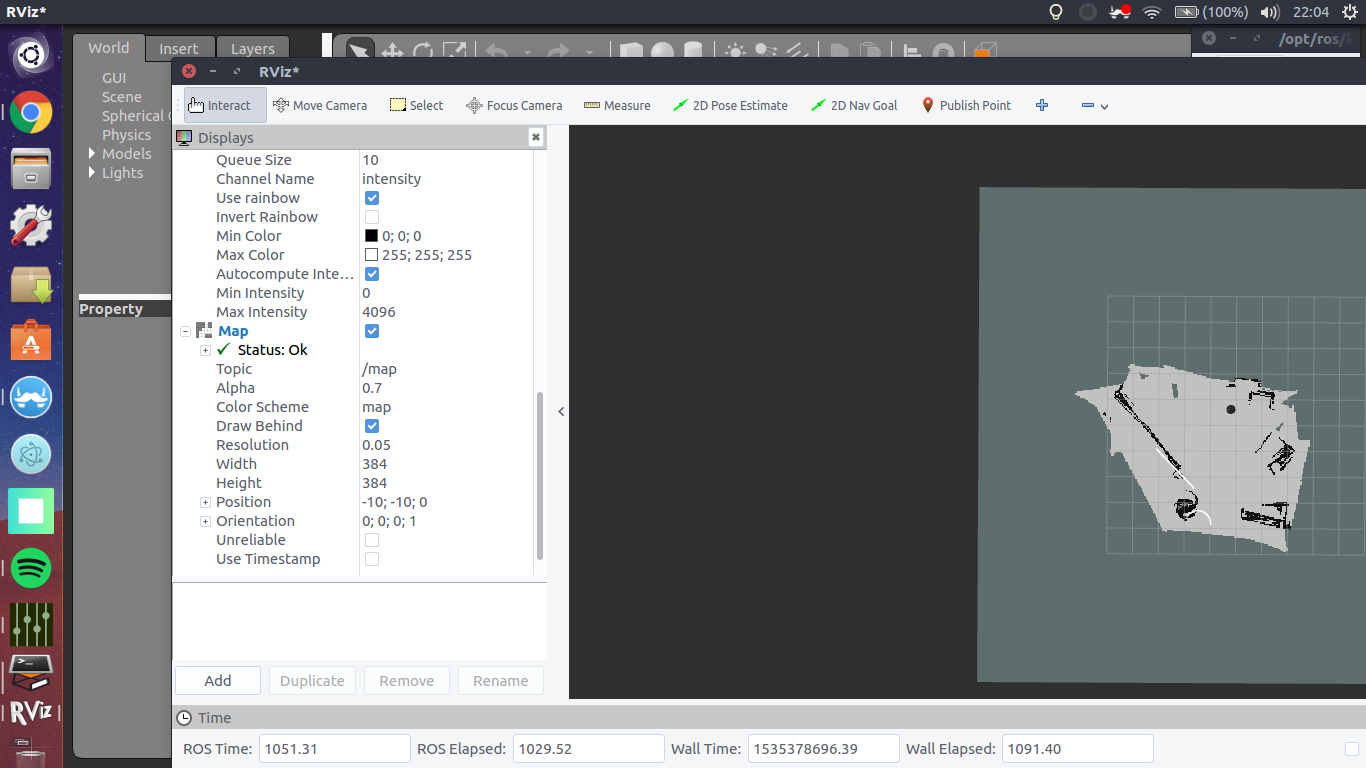
RVIZ mapping result and RVIZ settings -
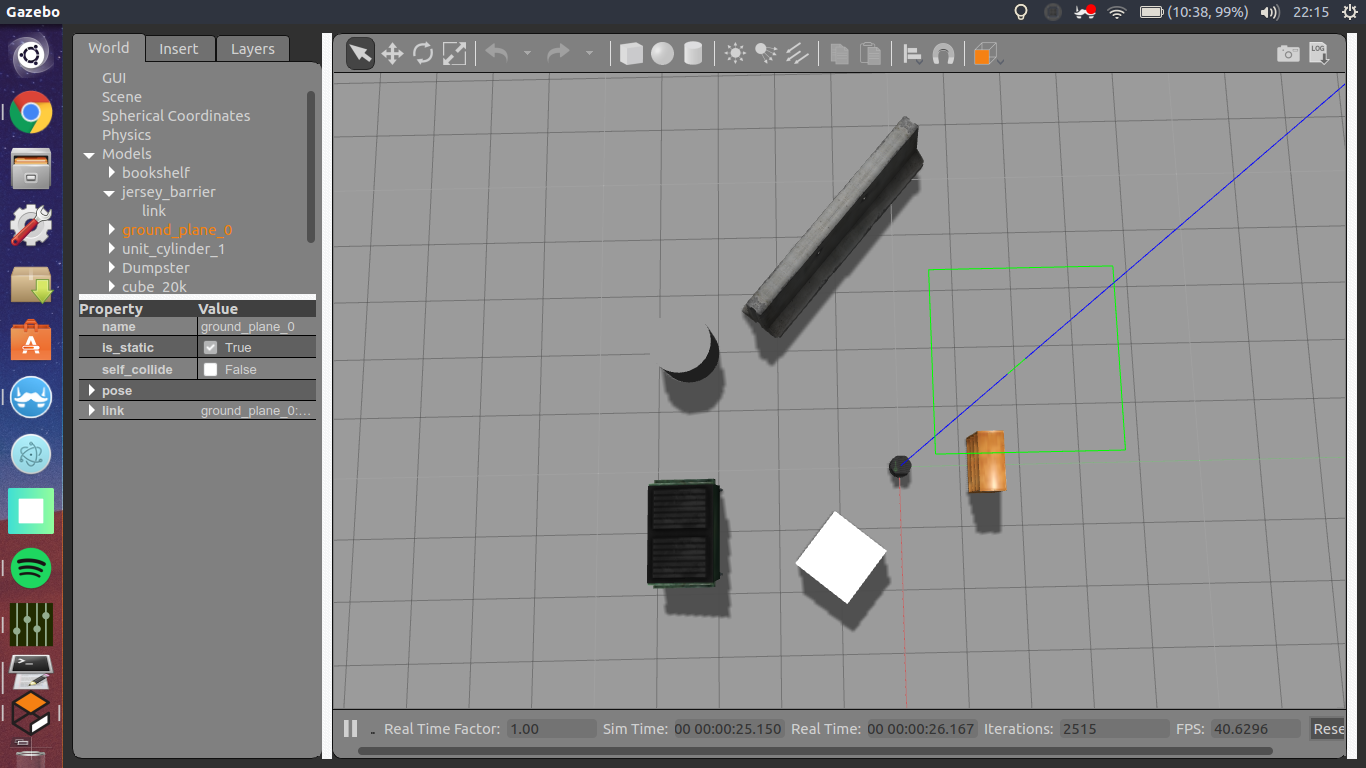
Gazebo world -
After creating my map I'll be running my amcl launch file to localize my robot in the map.
Edit: My map result after changing to a more defined world for my turtlebot.


add a comment

