
Scale and position problem with .STL as scene object in MoveIt!


Good day,
My team and I are new to ROS and MoveIt.
Currently we have the robot ready and want to insert the objects present (fixed) on the working space as scene objects for collision avoidance and visualization, we have the files in .stl (binary and ASCII) and .dae but we always have the problem that the scale of the object is way big (I know is a problem of scale) and when i try to correct it two problems arise:
- We do not have precise control of the scale with this slider in MoveIt.
- Once we scale the object is reduced the center point of the CAD files does not move with the object itself making it impossible to locate after.
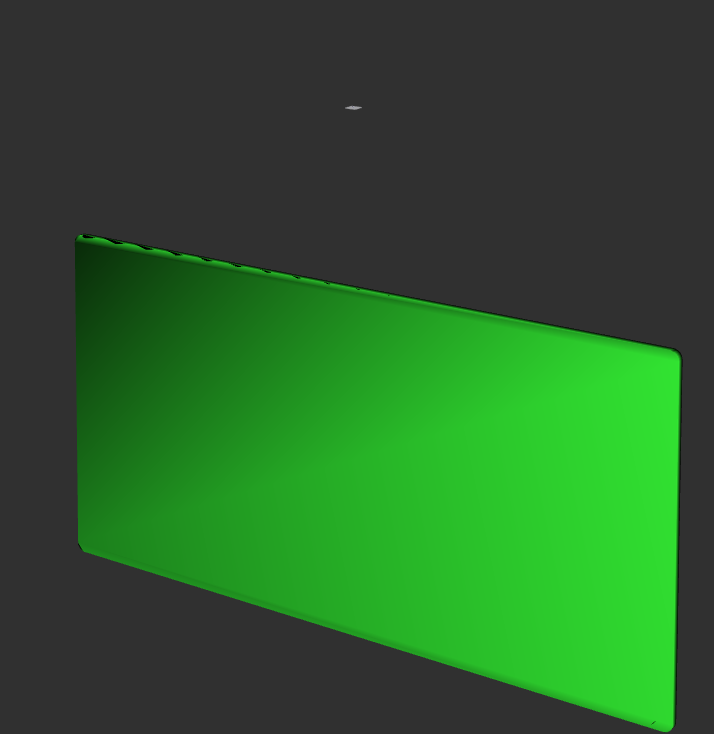
In thee image you will see the grid on top and the object that is suppose to measure 1200x600 mm, every time i scale it down it goes farther and farther away form the robot. I know that the scale error occures because MoveIt is thinking mm as meters, but I cannot control exactly the scale down parameter (0.001).
Am I doing something completely wrong ? How can I insert fairly complex CAD files properly?

ROS uses metres for everything (well, distances and dimensions, at least). So to make it easy for yourself, make sure to use metres as scales for your meshes. No scaling afterwards needed, no difficult work with the MoveIt RViz plugin.
Btw: if we're talking static scenes, you could also just add these objects to your urdf. It's perfectly ok for a urdf to contain more than just your robot.