
MoveIt! rviz MotionPlanning plugin broken Robot geometry
I followed the Moveit Setup Assistant Tutorial to configure a manipulator for use with MoveIt. I did
- load the URDF/Xacro file
- set the virtual joint
- add a planning group
- define a robot pose
- generate the configuration files without problems.
I left out the end effector part, because I do not have a real end effector. The manipulator has three DOF.
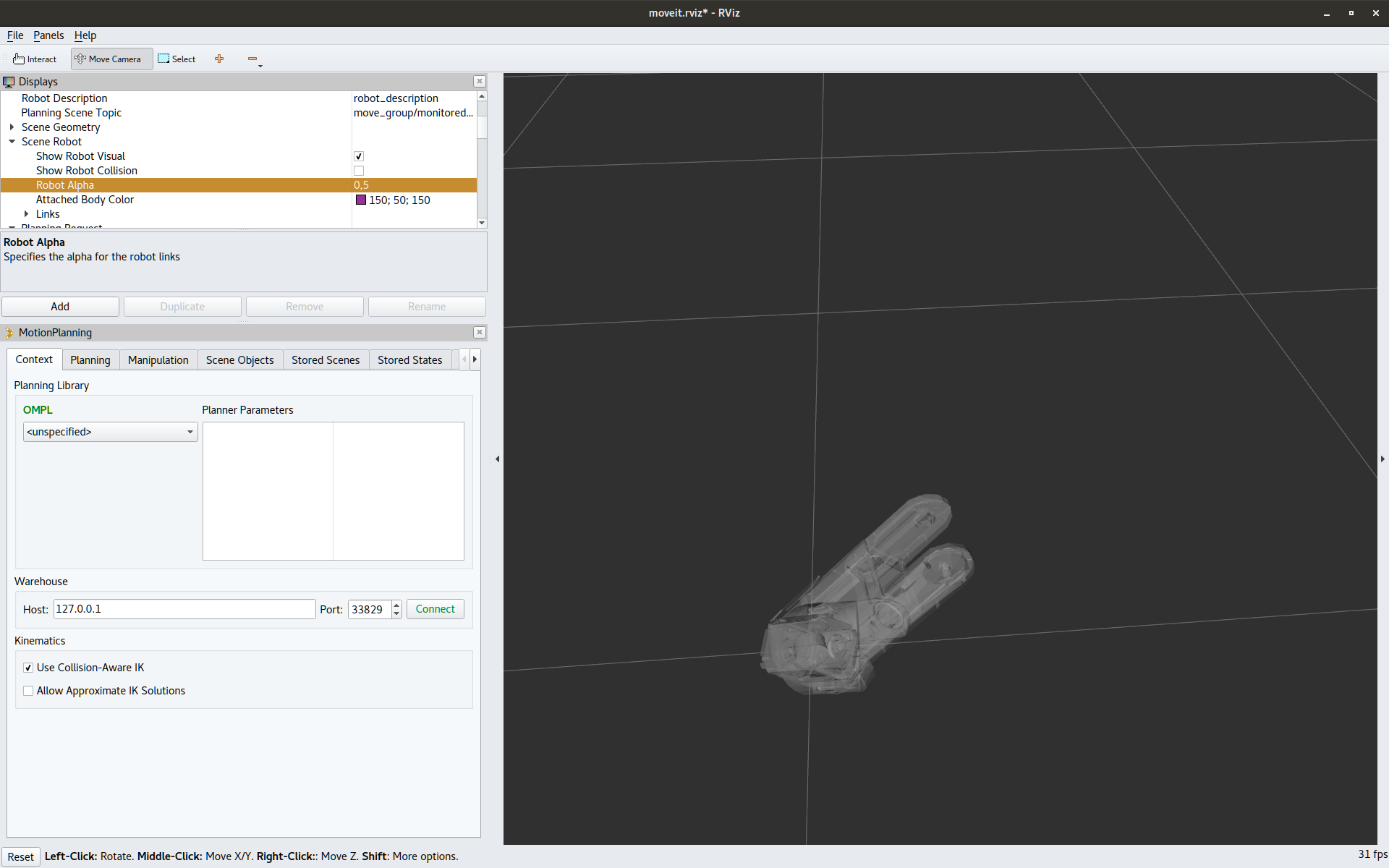
Now, when I start the demo.launch file rviz starts up, but the robot geometry is broken. The position of every link under "MotionPlanning->Scene Robot" is [0,0,0] and its orientation is set to some obviously incorrect value. Metaphorically speaking, the robot in rviz consists of a heap of links (robot parts).
Furthermore, I am missing the interactive markers. Searching the web the missing markers relate to the message No active joints or end effectors found for group ''. which I receive during the launch of rviz and which I cannot get rid of.
I have tested my xacro file with gazebo and it works flawlessly.
Here my updated and simplified SRDF file:
<?xml version="1.0" ?>
<robot name="mugator_manip">
<group name="manipulator">
<chain base_link="rotatory_base" tip_link="rotatory_drive" />
</group>
<group_state name="home" group="manipulator">
<joint name="q0" value="0" />
</group_state>
<virtual_joint name="virtual_joint" type="fixed" parent_frame="world" child_link="footprint" />
<disable_collisions link1="rotatory_base" link2="rotatory_drive" reason="Adjacent" />
</robot>
And the relevant output during launch of rviz:
[ INFO] [1510658130.699292603]: MoveGroup context using planning plugin ompl_interface/OMPLPlanner
[ INFO] [1510658130.699318489]: MoveGroup context initialization complete
You can start planning now!
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1510658134.100829824]: Loading robot model 'mugator_manip'...
[ INFO] [1510658134.548891308]: Starting scene monitor
[ INFO] [1510658134.554074274]: Listening to '/move_group/monitored_planning_scene'
[ INFO] [1510658134.875040587]: No active joints or end effectors found for group ''. Make sure you have defined an end effector in your SRDF file and that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1510658134.875249162]: No active joints or end effectors found for group 'manipulator'. Make sure you have defined an end effector in your SRDF file and that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1510658134.876849619]: No active joints or end effectors found for group 'manipulator'. Make sure you have defined an end effector in your SRDF file and that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1510658134.877298190]: Constructing new MoveGroup connection for group 'manipulator' in namespace ''
[ INFO] [1510658136.007301565]: Ready to take commands for planning group manipulator.
[ INFO] [1510658136.007387218]: Looking around: no
[ INFO] [1510658136.007429894]: Replanning: no
Any help is appreciated.
Edit: Screen shot of rviz:
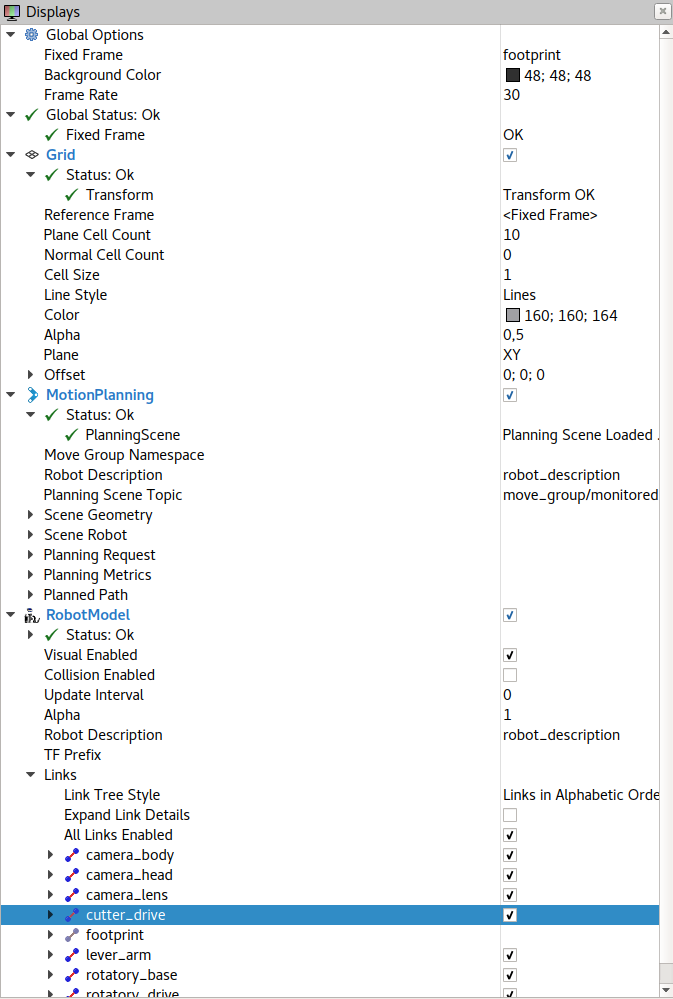
Edit: Screen shot of the Displays area of rviz.
Edit: Simplified URDF file which still shows a broken geometry:
<?xml version="1.0" ?>
<robot name="mugator_manip" xmlns:xacro="http://www.ros.org/wiki/xacro">
<gazebo>
<static>false</static>
<plugin filename="libgazebo_ros_control.so" name="gazebo_ros_control">
<robotNamespace>/mugator_manip</robotNamespace>
</plugin>
</gazebo>
<link name="footprint"/>
<joint name="p_joint" type="fixed">
<parent link="footprint"/>
<origin rpy="0 0 0" xyz="0 0 0.19"/>
<child link="rotatory_base"/>
</joint ...
Suggestion: remove all spaces from your link and joint names and try again.
I don't believe it's made explicit, but TF frames should also follow ROS Naming conventions. Support for whitespace is spotty.
Thanks for your advice regarding ROS Naming conventions. I removed the spaces. Unfortunately it did not change anything. Geometry is still broken :(
You removed the spaces from your urdf, recreated the moveit config pkg and then rebuilt your workspace?
The 'broken geometry' is a sign of missing TF frames. This can happen if
robot_state_publisherisn't started,joint_state_publisherisn't started, they can't find each other or MoveIt cannot work with your URDF.Without your urdf this may be difficult to debug.
If you could include a screenshot of your RViz window that could maybe help.
I removed the spaces. To be honest, i did not think about recompiling, but to make sure I deleted the moveit config pkg, recreated it again and recompiled the whole workspace with catkin_make. No change. The geometry is still broken.
Please make the
Displaysarea a little larger. I'm mostly interested in theFixed Framefield and those around it.If you add a
Robot Modeldisplay to RViz, does it also not show your robot correctly?I did not write 'compiling', but 'rebuilding'. The former is for code, the latter is to update your workspace with info about the new MoveIt config pkg that you created.