
rviz dows not display model (urdf tutorial)
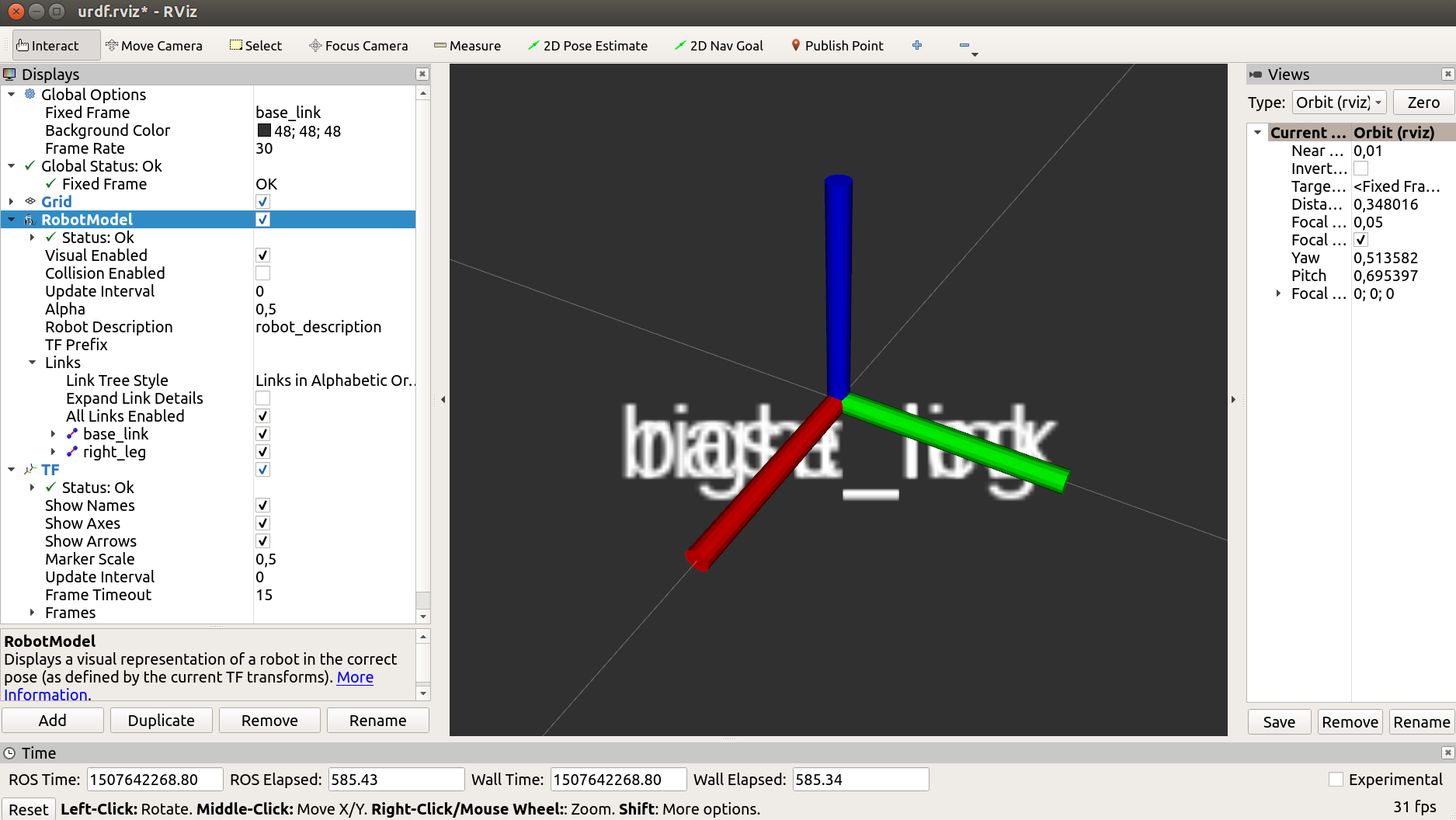
I have just installed ROS lunar on Ubuntu 17.04. I wanted to start with the urdf tutorial and tried to display the second model (02-multipleshapes.urdf) but rviz does not display the model. I do see the RobotModel Entry on the left side in the TreeView, the links are also there. But in the 3D view in the center I can only see an 3D axis with not mesh.
edit:
rosparam get /robot_description
outputs
"<?xml version=\"1.0\" ?>\n<!-- ===================================================================================\
\ -->\n<!-- | This document was autogenerated by xacro from /home/secret-path-to-my-workspace/urdf/01-myfirst.urdf\
\ | -->\n<!-- | EDITING THIS FILE BY HAND IS NOT RECOMMENDED \
\ | -->\n<!-- ===================================================================================\
\ -->\n<robot name=\"myfirst\">\n <link name=\"base_link\">\n <visual>\n \
\ <geometry>\n <cylinder length=\"0.6\" radius=\"0.2\"/>\n </geometry>\n\
\ </visual>\n <collision>\n <geometry>\n <cylinder length=\"0.6\"\
\ radius=\"0.2\"/>\n </geometry>\n </collision>\n </link>\n</robot>\n\n
which is actually the the same urdf file like in the tutorial (except for the collision part)

Without an image it's probably going to be hard to help you, so please attach one. I've just given you enough karma to do that.
@gvdhoorn thank you very much, I just added the image
Can you make sure that
robot_descriptioncontains the urdf that you think it does?A
rosparam get /robot_descriptionshould show that.yes it does, I updated by post accordingly. I was switsching between the first and the second model form the turoial, both don't work for me. To me it looks like rviz does start but it cant visualize anything
This could be caused by locale settings. See ros-visualization/rviz#1151.
@gvdhoorn my main system locale is in german and the VM where it worked was in english, I'll have a look into it