
Merging rosbag files and removing gaps of no messages
I have several bags recorded of navigating through an environment, with pauses between each bag from configuring the system. I would like to playback the entire sequence as one smooth continuous sequence. I merged the bags using https://gist.github.com/NikolausDemme... but there are large time gaps with no ROS messages in the merged bag as seen in the rqt_bag screenshot below.
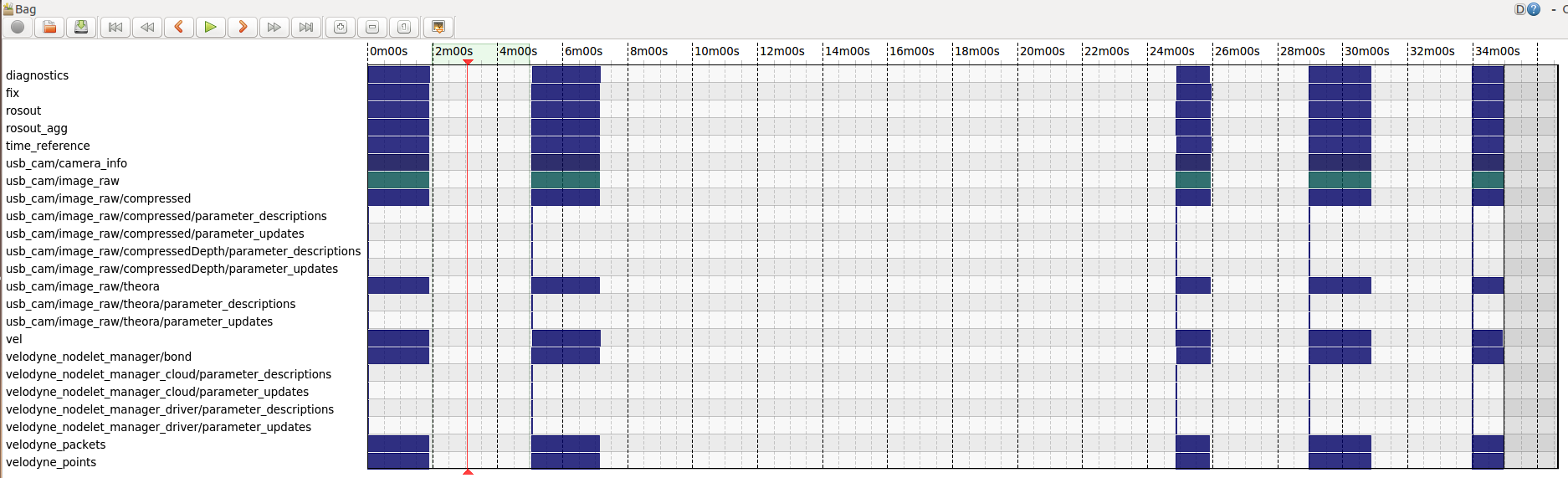
Is there any easy way to remove these timegaps?
Thanks!


I think this would require rewriting the timestamps of all involved msgs across all topics.
Doable, but I'm not aware of a tool that can do this OoB.
The scripts you link by Nikolaus could offer some inspiration for how to approach this.
Ah okay, I was hoping to not have to do this.
Well it could be that someone already wrote something for this, but I'm just not aware of it. That's why I commented instead of answering.
Let's see if other board members can come up with something.
But I believe that whatever tool you end up using, it will involve rewriting timestamps.