
How to fix Turtle frames in the RViz?

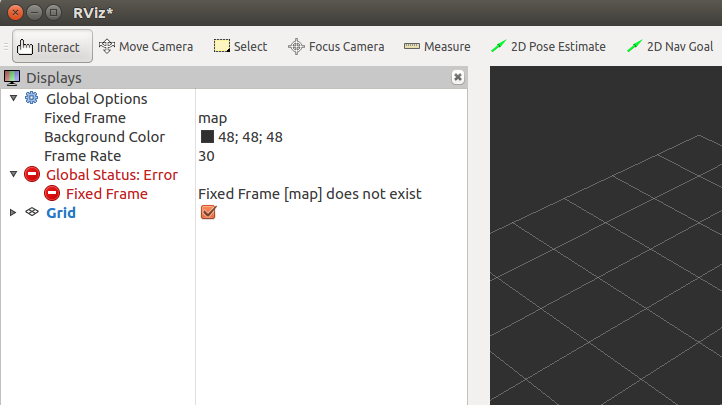
I am trying to learn RVIZ by doing the examples of a book, but the tool is displaying an Error in its global status:
Fixed Frame [map] doe not exist.
My Goal is to run the roslaunch turtle_tf turtle_tf_demo.launch demo, where turtle_bot can follow me using the key_inputs
Any Idea how to fix this? and see my Turtle frames
please note that am following the chapter3 of the book STEP by STEP, which by the way is not a rocket science recipe

The instructions clearly mention that you are supposed to change the "Fixed frame" from map to world while yours still point to map. And then add the TF tree from Add> TF: that is when your turtle frames are going to appear. Hope this clarifies.