
Navigation Stack Tuning Advice for Tight Spaces?
Hi All,
I'm working on tuning the Nav Stack for my Kobuki. I've set up a separate local and global inflation layer but I've not go it quite right. The robot regularly gets stuck where there is plenty of space to allow it though. Indeed going into the room isn't ever a problem, it's coming out. At the moment I get about a 50/50 percent success rate. I've mainly been playing around with different values for the cost_scaling_factor and inflation_radius (current settings below)
I've added a couple of pictures of the robot - stuck and the nav stack has given up recovery.
Settings are:
#cost_scaling_factor and inflation_radius were now moved to the inflation_layer ns
local_inflation_layer:
enabled: true
cost_scaling_factor: 10.0 # exponential rate at which the obstacle cost drops off (default: 10)
inflation_radius: 0.35 # max. distance from an obstacle at which costs are incurred for planning paths.
global_inflation_layer:
enabled: true
cost_scaling_factor: 5.0 # exponential rate at which the obstacle cost drops off (default: 10)
inflation_radius: 0.45 # max. distance from an obstacle at which costs are incurred for planning paths.
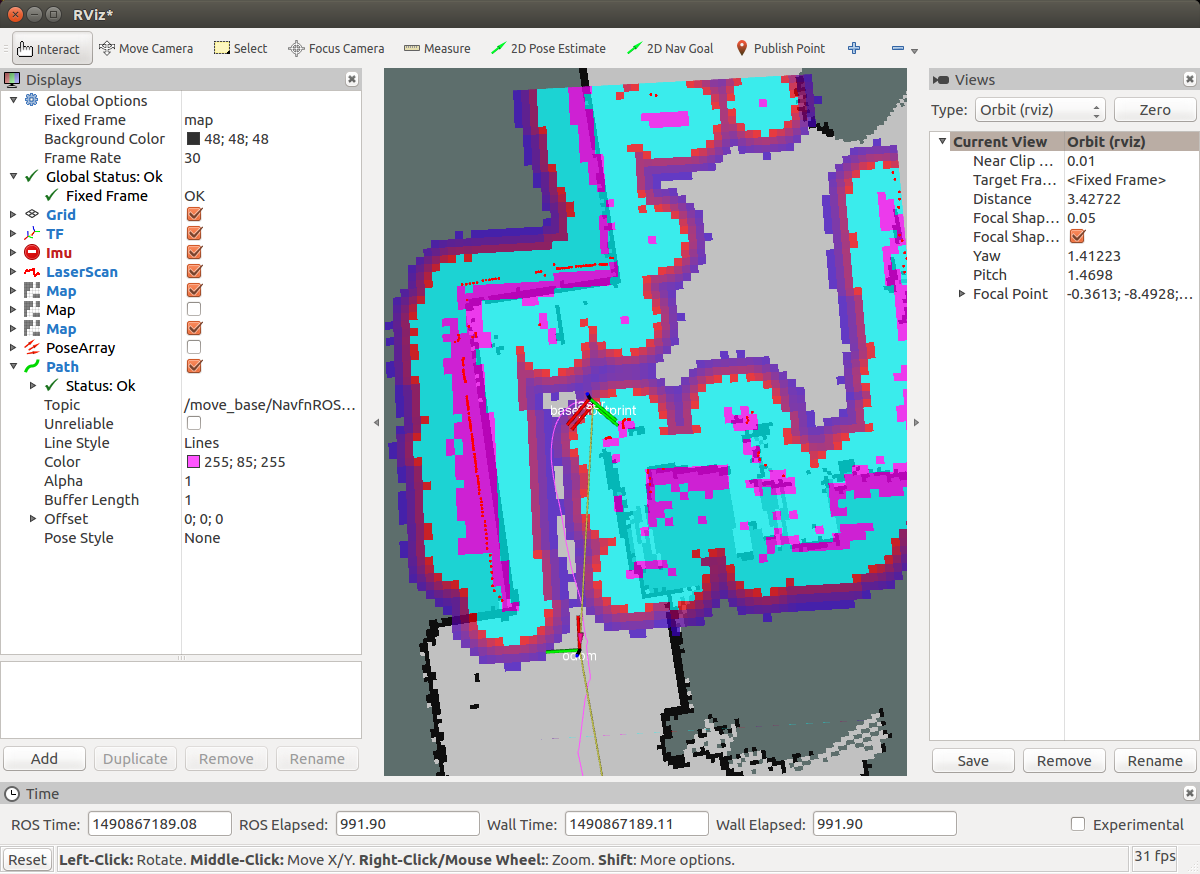
The map looks like this (the robot on the way out of the room)
and this is the actual environment
https://www.dropbox.com/sh/fwqa1sz5ty...
I've been using this as a starting point but I'm not getting the consistency I want yet- http://answers.ros.org/question/52549...
Thanks
Mark

You mention that the robot gets stuck coming out of the room, but not going in. This makes me wonder about how much your state estimate is drifting while the robot explores the room, and whether your map is correctly clearing obstacles.
Hi Mark, your resolution seems to be quite low. Have you tried increasing the resolution (i.e. decreasing the resolution parameter) ?