
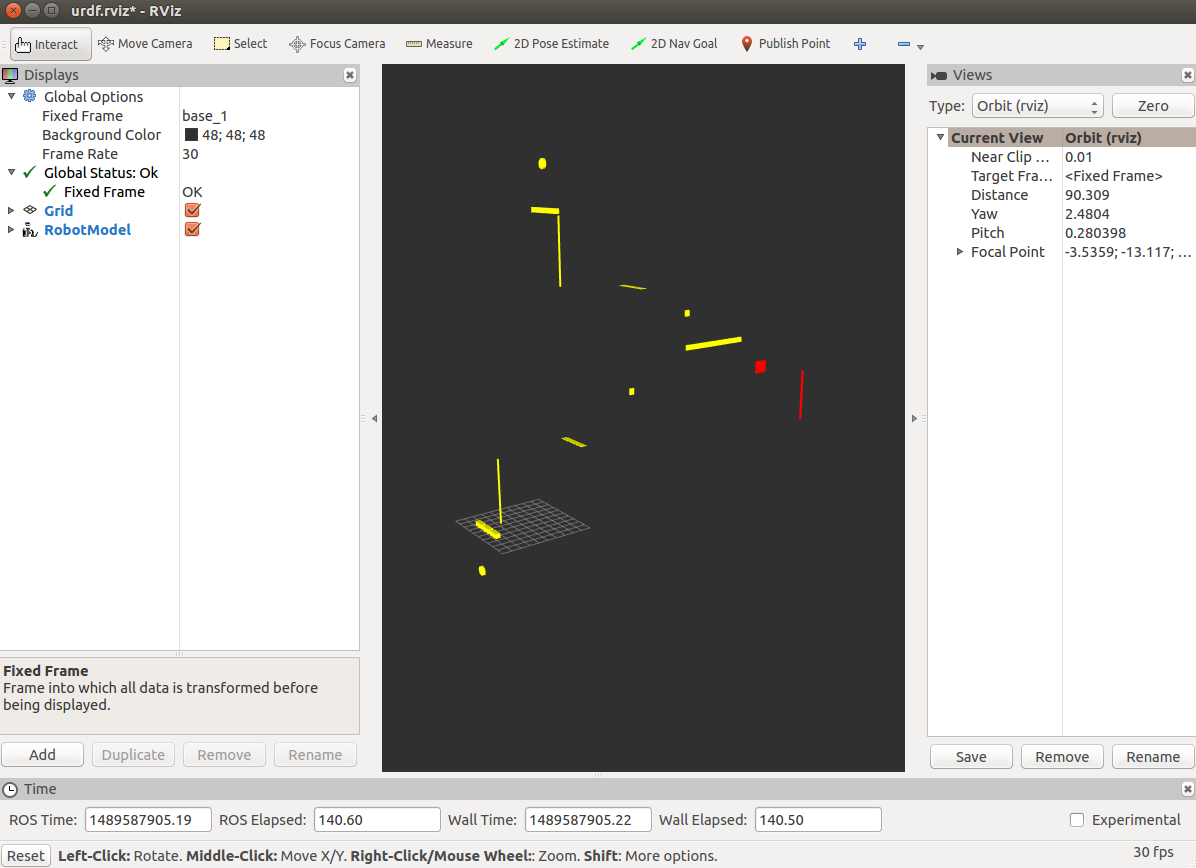
what should be the fixed frame? if we select our base link of our robot then we get a werid output
we wrote the URDF and lauch file to visualize the robot in rviz but if we select our base link(or any link) we get weird output as below:
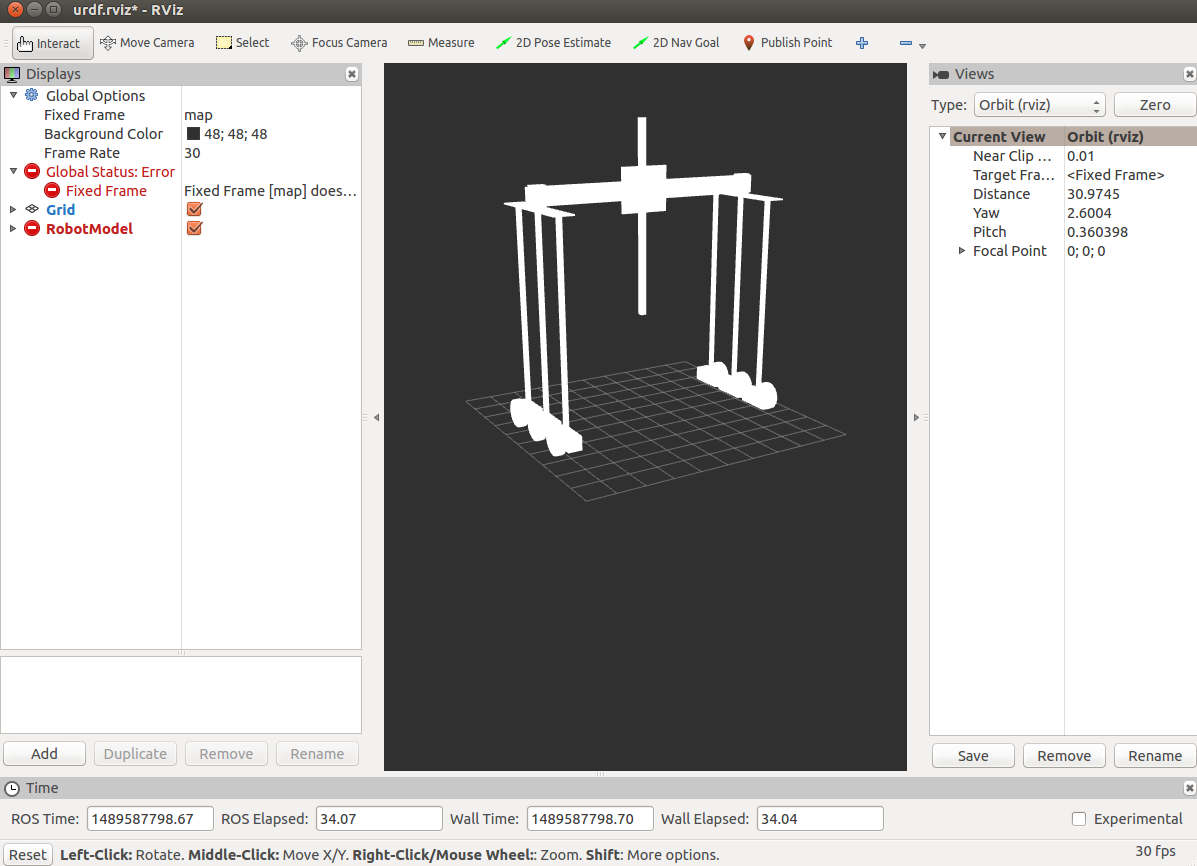
before selecting fixed frame our model is fine as shown below:
our URDF is:
<?xml version="1.0"?>
<robot name="cham_bot">
<link name="z_axis">
<visual>
<geometry>
<box size="0.2 0.2 6.5"/>
</geometry>
<origin rpy="0 0 0" xyz="0.25 0 7"/>
<material name="green">
<color rgba="1 0 0 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.2 0.2 6.5"/>
</geometry>
<origin rpy="0 0 0" xyz="0.25 0 7"/>
</collision>
</link>
<link name="cross_slide">
<visual>
<geometry>
<box size="0.05 1.7 1.5"/>
</geometry>
<origin rpy="0 0 0" xyz="0.125 0 8"/>
<material name="green">
<color rgba="1 0 0 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.05 1.7 1.5"/>
</geometry>
<origin rpy="0 0 0" xyz="0.125 0 8"/>
</collision>
</link>
<joint name="z_axis_to_cross_slide" type="prismatic">
<parent link="z_axis"/>
<child link="cross_slide"/>
<limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/> <!--specify exact values -->
<origin xyz="-0.127 8 3.9"/>
<axis xyz="0 0 1"/>
</joint>
<link name="beam">
<visual>
<geometry>
<box size="0.2 8.5 0.6"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 8"/>
<material name="yellow">
<color rgba="1 1 0 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.2 8.5 0.6"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 8"/>
</collision>
</link>
<joint name="cross_slide_to_beam" type="prismatic">
<parent link="cross_slide"/>
<child link="beam"/>
<limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/> <!--specify exact values -->
<origin xyz="-0.125 8 3.9"/>
<axis xyz="0 0 1"/>
</joint>
<link name="beam_bracket_1">
<visual>
<geometry>
<box size="0.25 0.5 0.7"/>
</geometry>
<origin rpy="0 0 0" xyz="0 3.9 8"/>
<material name="yellow">
<color rgba="1 1 0 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.25 0.5 0.7"/>
</geometry>
<origin rpy="0 0 0" xyz="0 3.9 8"/>
</collision>
</link>
<link name="beam_bracket_2">
<visual>
<geometry>
<box size="0.25 0.5 0.7"/>
</geometry>
<origin rpy="0 0 0" xyz="0 -3.9 8"/>
<material name="yellow">
<color rgba="1 1 0 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.25 0.5 0.7"/>
</geometry>
<origin rpy="0 0 0" xyz="0 -3.9 8"/>
</collision>
</link>
<joint name="beam_to_beam_bracket_1" type="fixed">
<parent link="beam"/>
<child link="beam_bracket_1"/>
<origin xyz="0.10 8 -3.9"/>
<axis xyz="0 0 0"/>
</joint>
<joint name="beam_to_beam_bracket_2" type="fixed">
<parent link="beam"/>
<child link="beam_bracket_2"/>
<origin xyz="0.10 8 3.9"/>
<axis xyz="0 0 0"/>
</joint>
<link name="beam_bracket_plate_1">
<visual>
<geometry>
<box size="3.75 0.7 0.05"/>
</geometry>
<origin rpy="0 0 0" xyz="0 3.9 7.625"/>
<material name="yellow">
<color rgba="1 1 0 1"/>
</material>
</visual ...
I'm not sure, but could it be that you have all your
origins relative to a shared 'world origin'? In URDF,origins are relative to the parent frame in which they are defined. Might be something to check.Each link has an associated tf frame, so adding a TF view in rviz will show you if your TF frames are in the right place and the models are mis-aligned with respect to those frames, or if the models are aligned correctly and the TF frames are in the wrong places.