
AMCL Initial Pose Problems & Local Map
HI,
I've got a problem with the initial pose of my Robot. When AMCL comes up with a initial pose of [0,0,0] the pose array is pointing 180 degrees in the wrong direction. If I use 2D Pose Estimate to correct this then the pose array is correct but the local map rotates as well - which means when I stick in a Nav Goal it can't plan as to the map the robot is stuck between two obstacles.
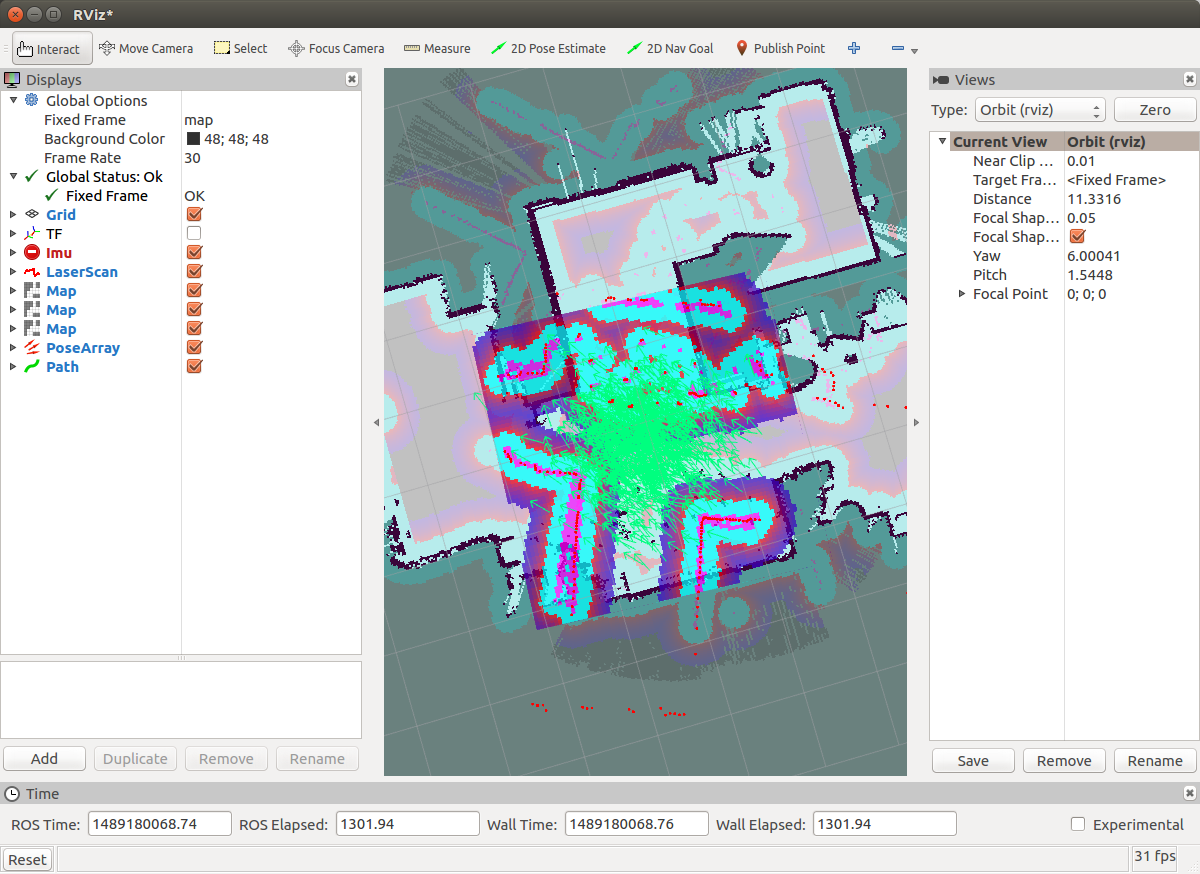
Picture belows shows how the worlds really looks
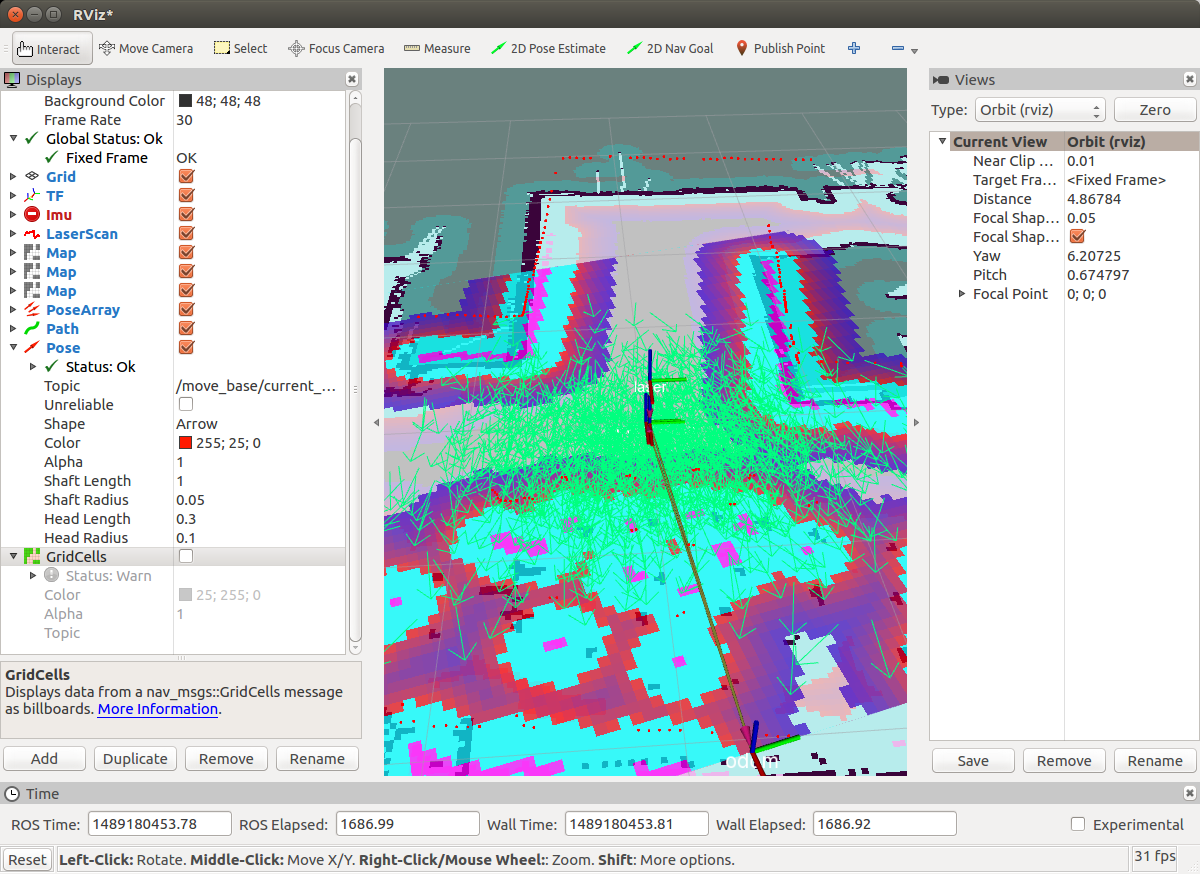 image description
And this is what happens when I try to correct the pose with the estimate
image description
And this is what happens when I try to correct the pose with the estimate
Why is this happening?
Thanks
Mark
add a comment
