
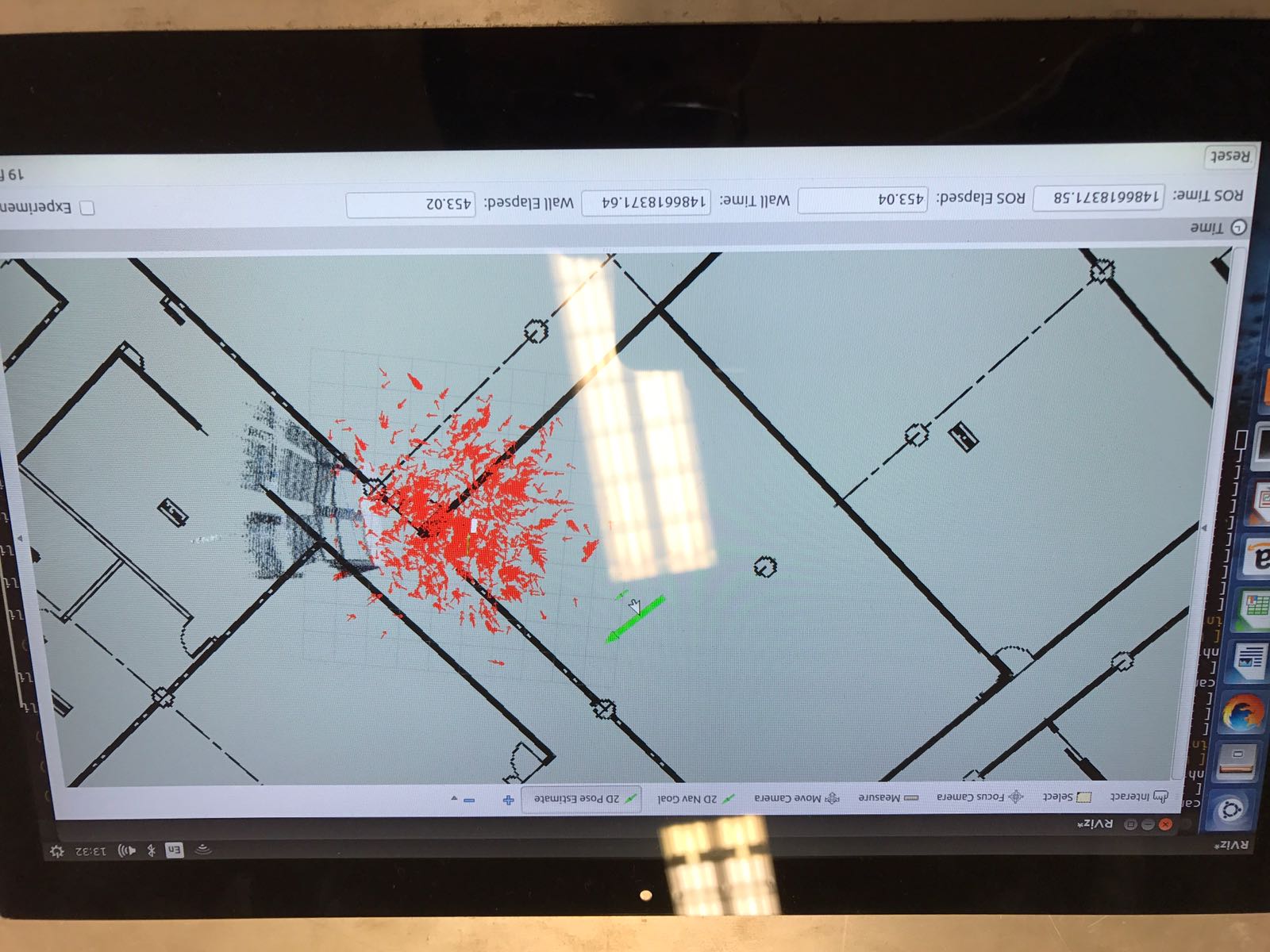
Robot does not listen to 2d pose estimate

when I try to tell it's 2d pose estimate it just stays where it is and show particle clouds around it's wrong location.
that is shown in this image.
I am very new to ros and i'm running out of time where learning step by step is more or less out of my options any help would be appreciated
yinht@yinht-desktop:~$ rosnode info /rviz_1486627152348467684
--------------------------------------------------------------------------------
Node [/rviz_1486627152348467684]
Publications:
* /initialpose [geometry_msgs/PoseWithCovarianceStamped]
* /rosout [rosgraph_msgs/Log]
* /goal [geometry_msgs/PoseStamped]
Subscriptions:
* /camera/rgb/image_raw [sensor_msgs/Image]
* /scan2 [unknown type]
* /move_base/local_costmap/footprint [geometry_msgs/PolygonStamped]
* /tf [tf2_msgs/TFMessage]
* /scan [sensor_msgs/LaserScan]
* /tf_static [tf2_msgs/TFMessage]
* /particlecloud [geometry_msgs/PoseArray]
* /map_updates [unknown type]
* /map [nav_msgs/OccupancyGrid]
Services:
* /rviz_1486627152348467684/get_loggers
* /rviz_1486627152348467684/reload_shaders
* /rviz_1486627152348467684/set_logger_level
contacting node http://yinht-desktop:41402/ ...
Pid: 27477
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /tf
* to: /diffusion_tf (http://yinht-desktop:38259/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /camera_base_link2 (http://yinht-desktop:46817/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /amcl (http://yinht-desktop:42593/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /camera_base_link (http://yinht-desktop:37021/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /camera_base_link3 (http://yinht-desktop:43573/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /camera_base_link1 (http://yinht-desktop:35271/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /robot_state_publisher (http://yinht-desktop:38135/)
* direction: inbound
* transport: TCPROS
* topic: /tf_static
* to: /robot_state_publisher (http://yinht-desktop:38135/)
* direction: inbound
* transport: TCPROS
* topic: /particlecloud
* to: /amcl (http://yinht-desktop:42593/)
* direction: inbound
* transport: TCPROS
* topic: /camera/rgb/image_raw
* to: /camera/camera_nodelet_manager (http://yinht-desktop:41082/)
* direction: inbound
* transport: TCPROS
* topic: /move_base/local_costmap/footprint
* to: /move_base (http://yinht-desktop:34315/)
* direction: inbound
* transport: TCPROS
* topic: /map
* to: /map_server (http://yinht-desktop:41602/)
* direction: inbound
* transport: TCPROS
* topic: /scan
* to: /hokuyo_laser (http://yinht-desktop:44867/)
* direction: inbound
* transport: TCPROS

a bit more information would be appreciated. E.g. what localization are you using? I am guessing
amcl?The
amclinipose topic isinitialpose. So check that your are actually sending this there.Also, is
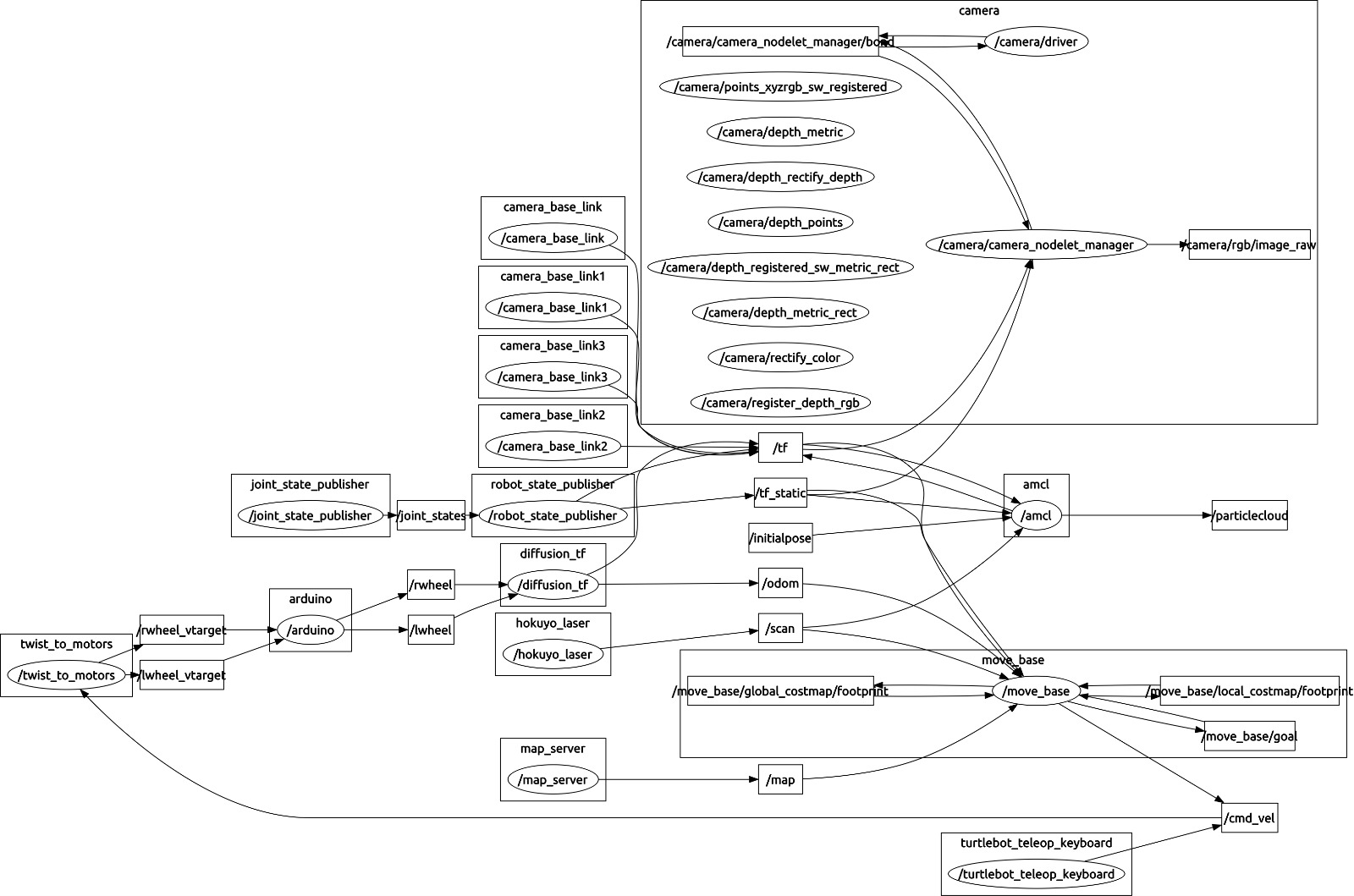
rvizon a remote machine? This could make a difference tooyes I am using amcl, initialpose has a connection to the /amcl. I am not using a remote machine it's on the same PC. I will post my rqt_graph if that helps
with
rvizrunning, please...rviz is running
but not showing up in the graph. Please configure the graph so that we see it. Or:
rosnode info /rviz_5468461351(check to get the right one, should have some numbers trailing).Node [/rviz_5467461351] Publications: None
Subscriptions: None
Services: None
cannot contact [/rviz_5467461351]: unknown node
Alright:
rosnode info /rviz_then hit tab and take the one that actually completes!I updated the question with the
rosnode info /rviz_sorry I tried using the preformatted text button but it didn't work