
Depthcloud and Pointcloud2 not consistent in Rviz

I am using a picoflexx sensors and a ros package that wraps up the driver and offers a ros interface. There are two packages, pico_flexx_driver and ros_picoflexx. I tried both of them (modifying ros_picoflexx to publish camera_info as well) and I noticed that when displaying the pointcloud in rviz, it doesn't match exactly with the reconstructed pointcloud from image depth (DepthCloud). Here is an example:
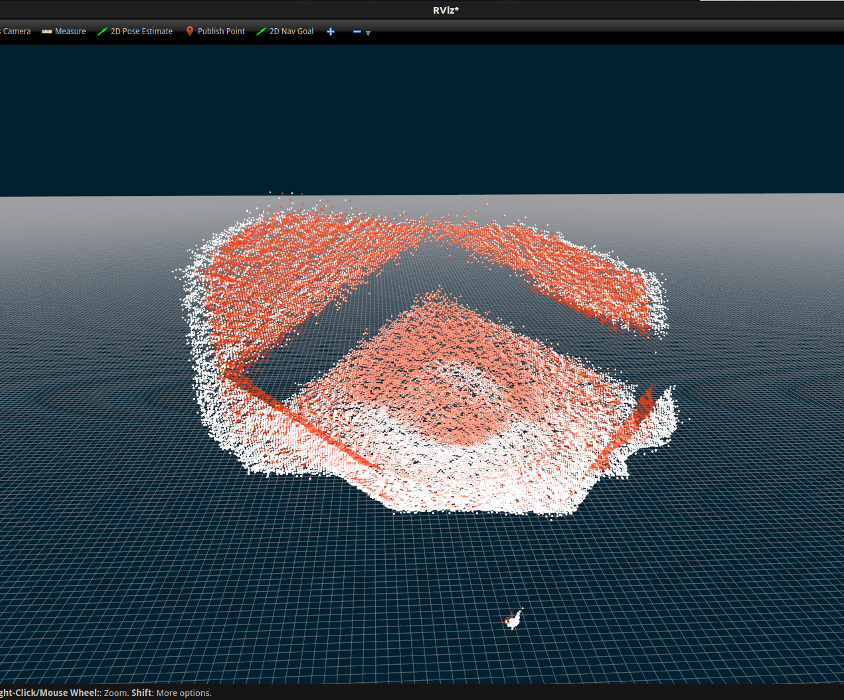
In red the pointcloud obtained directly from the sensor as a list of 3d points, in white the depthcloud reconstructed by Rviz using image_depth and camera_info.
I didn't test with other camera models, but could this be caused by wrong intrinsic calibration parameters?
add a comment
