
TF2 exception warning
Hi I trying to use some examples with this packages packages getting this warning [ WARN] [1461653020.332402156]: TF2 exception:
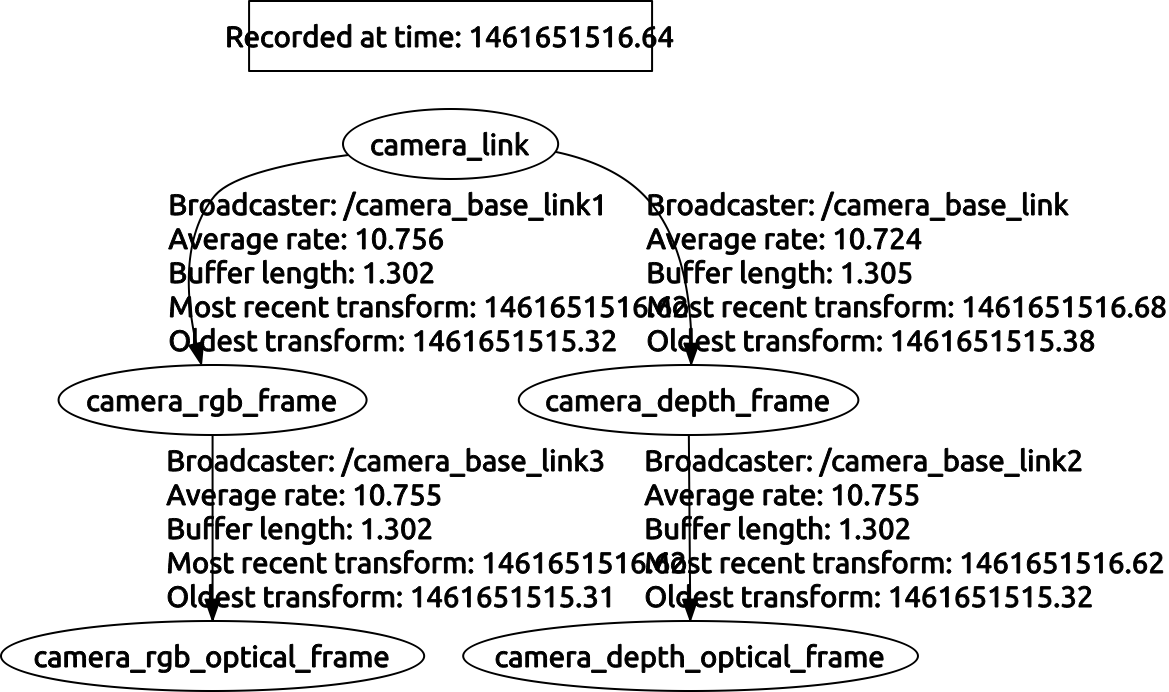
Lookup would require extrapolation into the future. Requested time 1461653020.318166665 but the latest data is at time 1461653020.303369825, when looking up transform from frame [camera_depth_optical_frame] to frame [camera_rgb_optical_frame], so I checked the rqt_graph and is something
, but I don't known why is this warning and wiht the command roswtf I get :
Found 1 warning(s). Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected: * /camera/camera_nodelet_manager: * /tf_static
Thank you and best regards
add a comment

