
Robot position Rviz is jumping
I'm using Indigo on Ubuntu 14.04. I use MoveIT to control a robot arm (cyton gamma 1500) and visualize it in Rviz. I have a camera mounted on the gripper of the arm, and I'm detecting a chess board in front of the arm.
My problem that the current state of the is switching between the initial state and the real current sate.
So, if I send a group.move() or group.execute(plan) command, than in RVIZ the current and goal states are showed well, but with a high frequency it appears the initial state (upright) of the arm.
This is not only a simulation issue, because in the tf topic also can be detected. The relative position of the chessboard is showed in the two places as the figure shows: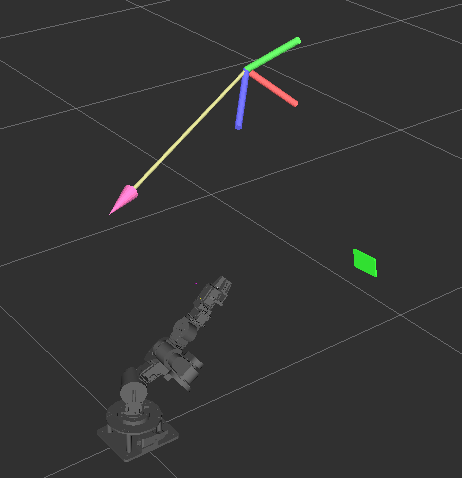
The green object is the detected chessboard at the first time published its position, while the TF arrow and axes are showing the "current" position which is a view from the initial position of the arm.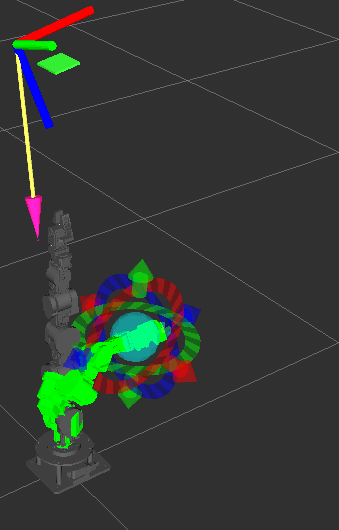 Here you can see a frame where the current state (green) and the initial position (gray) is showed. The real position of the hardware is the green one.
Here you can see a frame where the current state (green) and the initial position (gray) is showed. The real position of the hardware is the green one.
Why does the the inital position always show up while I plane and execute ? Do I have to set something in a MoveIt launch file?
