
timestamps for ros topics not updating smoothly

I noticed that the timestamps associated with my topics is not updating smoothly. It will go for several messages without changing (or changing by some very small amount), then change a lot all of a sudden. This is very obvious when looking at rqt_plot because you end up getting a bunch of points right on top of one another, then a large jump along the x axis, then a bunch more points on top of each other. The problem is also present in bag files.
I did notice that I can cut down on the number of messages I am publishing and at some point the problem goes away. Really not sure what is going on here. Any help is appreciated.
Update
To clarify, the timestamps I'm referring to are not timestamps within my ros topics, they are the timestamps automatically generated by ros for all topics that are published.
Here is an example of what I am talking about with rqt_plot
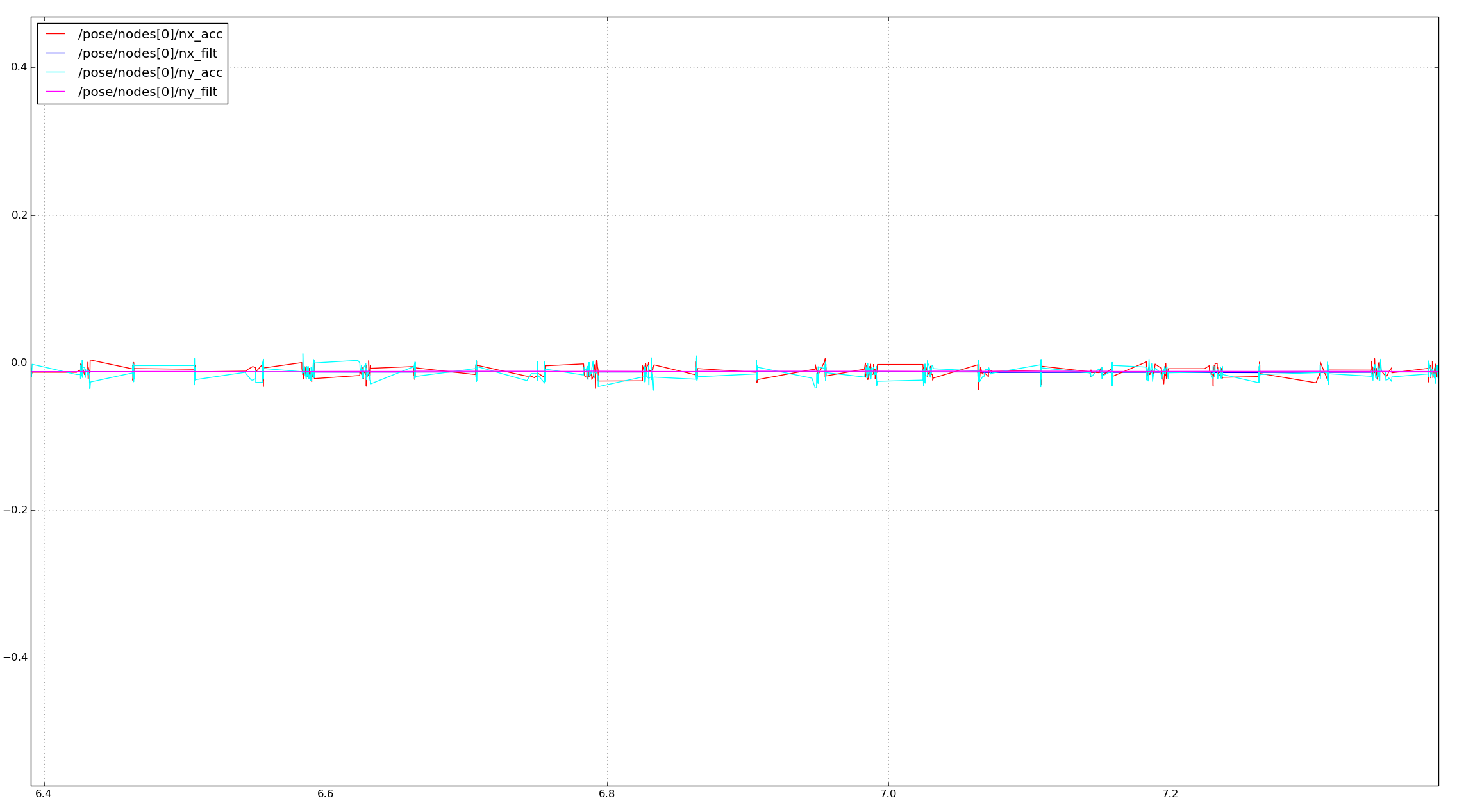
I'm publishing the following topics at 1000Hz (although I see the problem even if I publish them as slow as 50Hz). The topics I'm publishing have the following structure:
/pose
pose_msg.msg
node_pose_msg[10] nodes
node_pose_msg.msg
float64 m
float64 nx_acc
float64 ny_acc
float64 nx_gyr
float64 ny_gyr
float64 nx_filt
float64 ny_filt
float64 acc
float64 gyr
I'm publishing about 5 topics of this general size and structure. Is this just too much data for the ros messaging infrastructure to keep up with? It certainly doesn't seem like it should be.

are using Stage? because it has a simulation time step that might result in the behavior you are describing.
No, nothing like that. Just publishing a bunch of sensor and state data.
can add your rqt_plot output here, to help us find a solution? besides that, how are you stamping your messages? did you write the sensors drivers yourself?
Thanks for the response. I updated my post to address your questions.