
Ros on fedora can't communicate publisher/subscriber

Hello,
I'm using the fedora repo given by @cottsay. I might be doing something stupid but it seems to me that the messages are not working fine.
if I do :
roscore
then
rostopic echo /search
then
rostopic pub -1 /search std_msgs/Bool 'data : False'
Nothing is received.
I got the good number of node if I do a rosnode list and when using rostopic info search I can see a node subscribing to the topic. I might do something incredibly stupid, but for now I did not find what is the problem and I don't really know what to do to debug it...
EDIT : Still having that problem. This is my repolist :
$ yum repolist
Modules complémentaires chargés : langpacks, refresh-packagekit
bumblebee/20
bumblebee-nonfree/20
fedora/20/x86_64
google-talkplugin
planetccrma/20/x86_64
planetcore/20/x86_64
rpmfusion-free/20/x86_64
rpmfusion-free-updates/20/x86_64
rpmfusion-nonfree/20/x86_64
rpmfusion-nonfree-updates/20/x86_64
russianfedora-free/20/x86_64
russianfedora-free-updates/20/x86_64
russianfedora-nonfree/20/x86_64
russianfedora-nonfree-updates/20/x86_64
smd-ros-shadow-fixed/20/x86_64
smd-ros-staging/20/x86_64
*updates/20/x86_64
virtualbox/20/x86_64
I did yum install ros-hydro-desktop-full. I think it might be depend on my computer and not on ros itself but I have no idea what causes this. Here is a screenshot of what I'm doing :
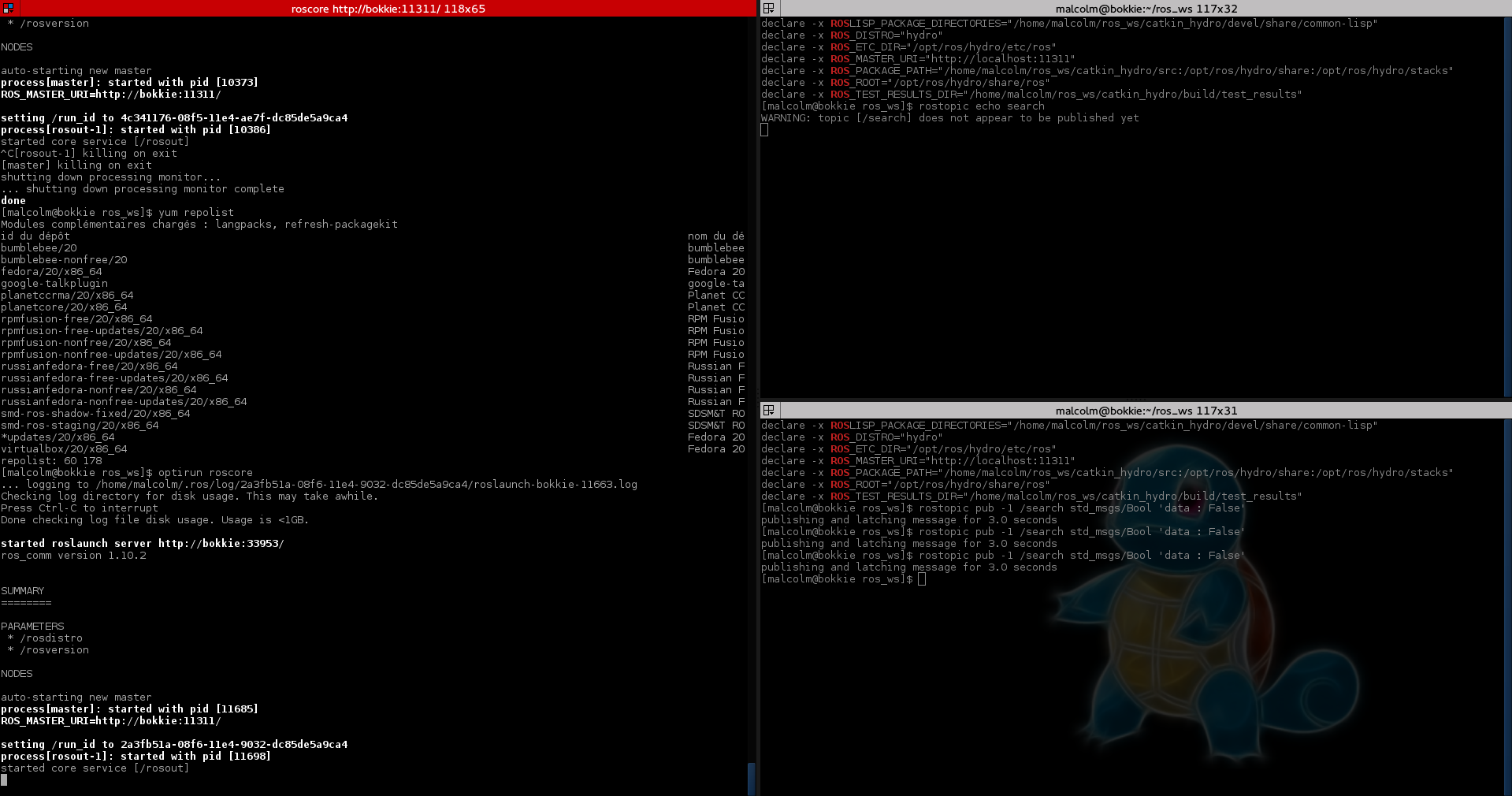
And nothing is received.
Here is my .bashrc as well concerning hydro :
alias hydro='source /opt/ros/hydro/setup.bash && source /home/malcolm/ros_ws/catkin_hydro/devel/setup.bash && export EDITOR='nano' && export ROS_PACKAGE_PATH=/home/malcolm/ros_ws/catkin_hydro/src:/opt/ros/hydro/share:/opt/ros/hydro/stacks
and the env variable of my system :
declare -x ROSLISP_PACKAGE_DIRECTORIES="/home/malcolm/ros_ws/catkin_hydro/devel/share/common-lisp"
declare -x ROS_DISTRO="hydro"
declare -x ROS_ETC_DIR="/opt/ros/hydro/etc/ros"
declare -x ROS_MASTER_URI="http://localhost:11311"
declare -x ROS_PACKAGE_PATH="/home/malcolm/ros_ws/catkin_hydro/src:/opt/ros/hydro/share:/opt/ros/hydro/stacks"
declare -x ROS_ROOT="/opt/ros/hydro/share/ros"
declare -x ROS_TEST_RESULTS_DIR="/home/malcolm/ros_ws/catkin_hydro/build/test_results"
EDIT : It seems more like my system is strangely slow. I'v launch a bunch of node right now and each time I'm trying to have the tf with this command : cd /var/tmp && rosrun tf view_frames && evince frames.pdf I either have no tf data, or partial tf data, not always the sames... which makes me thing that it may just be very slow...


Are you sure the command you posted is correct? The usage for `rostopic pub` is: ``` Usage: rostopic pub /topic type [args...] ``` so I used the command: ``` rostopic pub -1 /search std_msgs/Bool 'data : False' ``` which was successful. What are you trying to do with the `--`?
Woups I had the same thing again today... Just to be sure I just need : smd-ros-shadow-fixed/20/x86_64 and smd-ros-staging/20/x86_64 as repo or do I miss something ? I'm reinstalling it now...
I'm pretty sure you're right and it has nothing to do with the repo since after after some trying the problem tend to appear and go depending on when. When it's working it seem kinda slow to me compare to my ubuntu and I'm wondering if it has smthg to do with it. I'll try your suggestion next time.