
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
The picking mechanism in RViz renders the scene to a separate buffer with a special "pick" scheme, and that will always only return one object id.
There is no nice general solution to this, but depending on what you want to do, you might want to use Ogre's scene query mechanism, or change the picking scheme (named "Pick") of the transparent object so that it is invisible in the picking buffer.
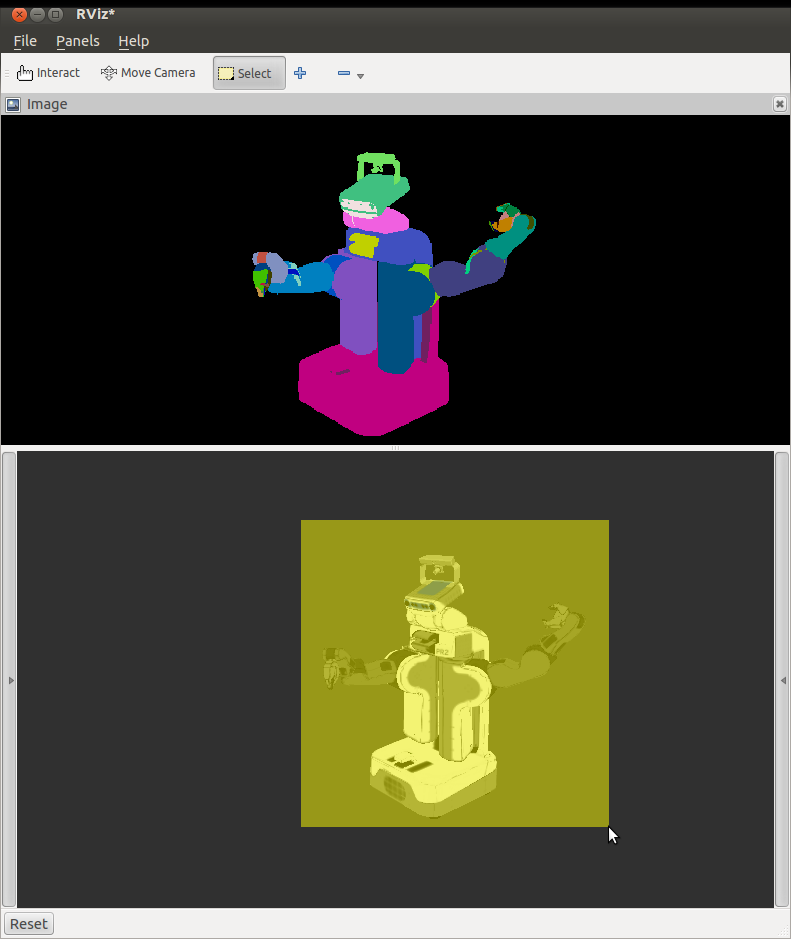
To debug this, RViz has a useful command line option "-v", which will make it publish the picking buffer to /rviz_debug/pick. You can then use the "select" tool to trigger the generation of a picking buffer (see screenshot).
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
