
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Correction made to correctly orient the Point cloud data:
<1> Modify link name from link to camera_link in above Kinect's Gazebo model.
<model name="kinect">
<static>true</static>
<pose>1.274070 -0.011558 1.961223 0.021866 0.611102 -3.121294</pose>
<link name="camera_link">
<inertial>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.073000 0.276000 0.072000</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<mesh>
<uri>model://kinect/meshes/kinect.dae</uri>
</mesh>
</geometry>
</visual>
<sensor name='camera' type='depth'>
<update_rate>20</update_rate>
<camera name='__default__'>
<horizontal_fov>1.0472</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.05</near>
<far>3</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<baseline>0.1</baseline>
<alwaysOn>true</alwaysOn>
<updateRate>15.0</updateRate>
<cameraName>camera</cameraName>
<imageTopicName>/camera/rgb/image_raw</imageTopicName>
<cameraInfoTopicName>/camera/rgb/camera_info</cameraInfoTopicName>
<depthImageTopicName>/camera/depth_registered/image_raw</depthImageTopicName>
<depthImageCameraInfoTopicName>/camera/depth_registered/camera_info</depthImageCameraInfoTopicName>
<pointCloudTopicName>/camera/depth_registered/points</pointCloudTopicName>
<frameName>camera_rgb_optical_frame</frameName>
<distortion_k1>0.00000001</distortion_k1>
<distortion_k2>0.00000001</distortion_k2>
<distortion_k3>0.00000001</distortion_k3>
<distortion_t1>0.00000001</distortion_t1>
<distortion_t2>0.00000001</distortion_t2>
<pointCloudCutoff>0.35</pointCloudCutoff>
<pointCloudCutoffMax>4.5</pointCloudCutoffMax>
<CxPrime>0</CxPrime>
<Cx>0</Cx>
<Cy>0</Cy>
<focalLength>0</focalLength>
<hackBaseline>0</hackBaseline>
</plugin>
</sensor>
<self_collide>0</self_collide>
<kinematic>0</kinematic>
</link>
</model>
<2> Add static transform as suggested by Gaurav Gupta
<node name="world_to_cameralink_transform_publisher"
pkg="tf"
type="static_transform_publisher"
args="1.274070 -0.011558 1.961223 -3.121294 0.611102 0.021866 world camera_link 100"/>
<node name="kinect_optical_transform"
pkg="tf"
type="static_transform_publisher"
args="0 0 0 -1.5707 0 -1.5707 camera_link camera_rgb_optical_frame 100"/>
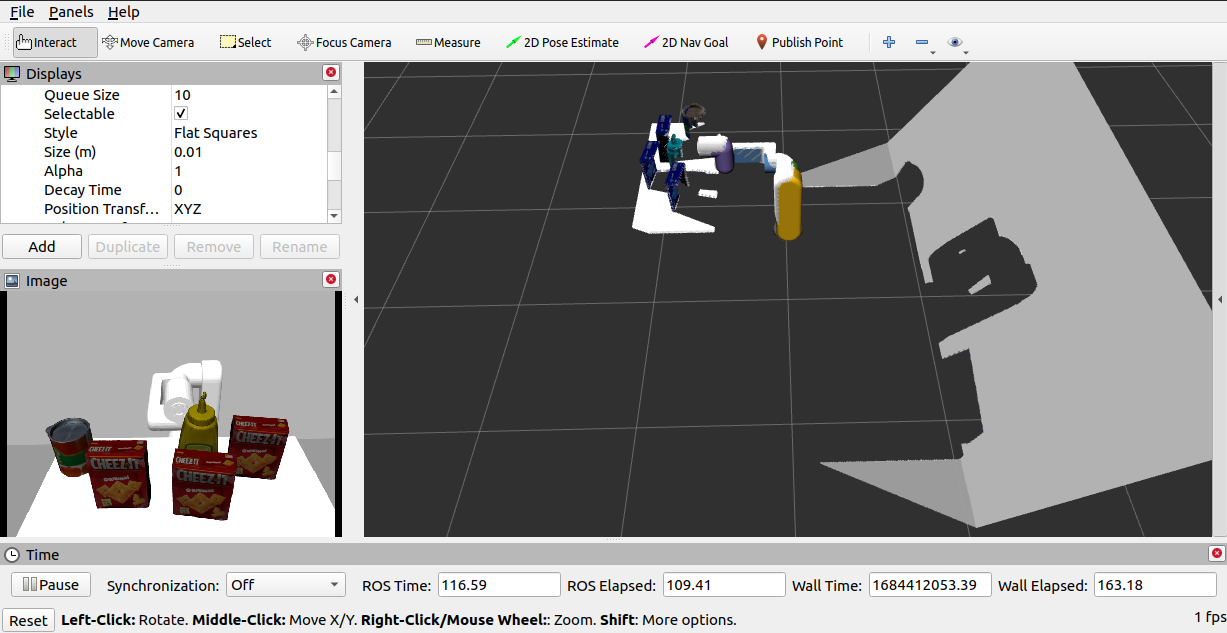
Final output
| | 2 | No.2 Revision |
Correction Modifications made to correctly orient the Point cloud data:
<1> Modify Change link name from link to camera_link in above Kinect's Gazebo model.
<model name="kinect">
<static>true</static>
<pose>1.274070 -0.011558 1.961223 0.021866 0.611102 -3.121294</pose>
<link name="camera_link">
<inertial>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.073000 0.276000 0.072000</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<mesh>
<uri>model://kinect/meshes/kinect.dae</uri>
</mesh>
</geometry>
</visual>
<sensor name='camera' type='depth'>
<update_rate>20</update_rate>
<camera name='__default__'>
<horizontal_fov>1.0472</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.05</near>
<far>3</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<baseline>0.1</baseline>
<alwaysOn>true</alwaysOn>
<updateRate>15.0</updateRate>
<cameraName>camera</cameraName>
<imageTopicName>/camera/rgb/image_raw</imageTopicName>
<cameraInfoTopicName>/camera/rgb/camera_info</cameraInfoTopicName>
<depthImageTopicName>/camera/depth_registered/image_raw</depthImageTopicName>
<depthImageCameraInfoTopicName>/camera/depth_registered/camera_info</depthImageCameraInfoTopicName>
<pointCloudTopicName>/camera/depth_registered/points</pointCloudTopicName>
<frameName>camera_rgb_optical_frame</frameName>
<distortion_k1>0.00000001</distortion_k1>
<distortion_k2>0.00000001</distortion_k2>
<distortion_k3>0.00000001</distortion_k3>
<distortion_t1>0.00000001</distortion_t1>
<distortion_t2>0.00000001</distortion_t2>
<pointCloudCutoff>0.35</pointCloudCutoff>
<pointCloudCutoffMax>4.5</pointCloudCutoffMax>
<CxPrime>0</CxPrime>
<Cx>0</Cx>
<Cy>0</Cy>
<focalLength>0</focalLength>
<hackBaseline>0</hackBaseline>
</plugin>
</sensor>
<self_collide>0</self_collide>
<kinematic>0</kinematic>
</link>
</model>
<2> Add static transform nodes as suggested by Gaurav Gupta
<node name="world_to_cameralink_transform_publisher"
pkg="tf"
type="static_transform_publisher"
args="1.274070 -0.011558 1.961223 -3.121294 0.611102 0.021866 world camera_link 100"/>
<node name="kinect_optical_transform"
pkg="tf"
type="static_transform_publisher"
args="0 0 0 -1.5707 0 -1.5707 camera_link camera_rgb_optical_frame 100"/>
Final output
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.