
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
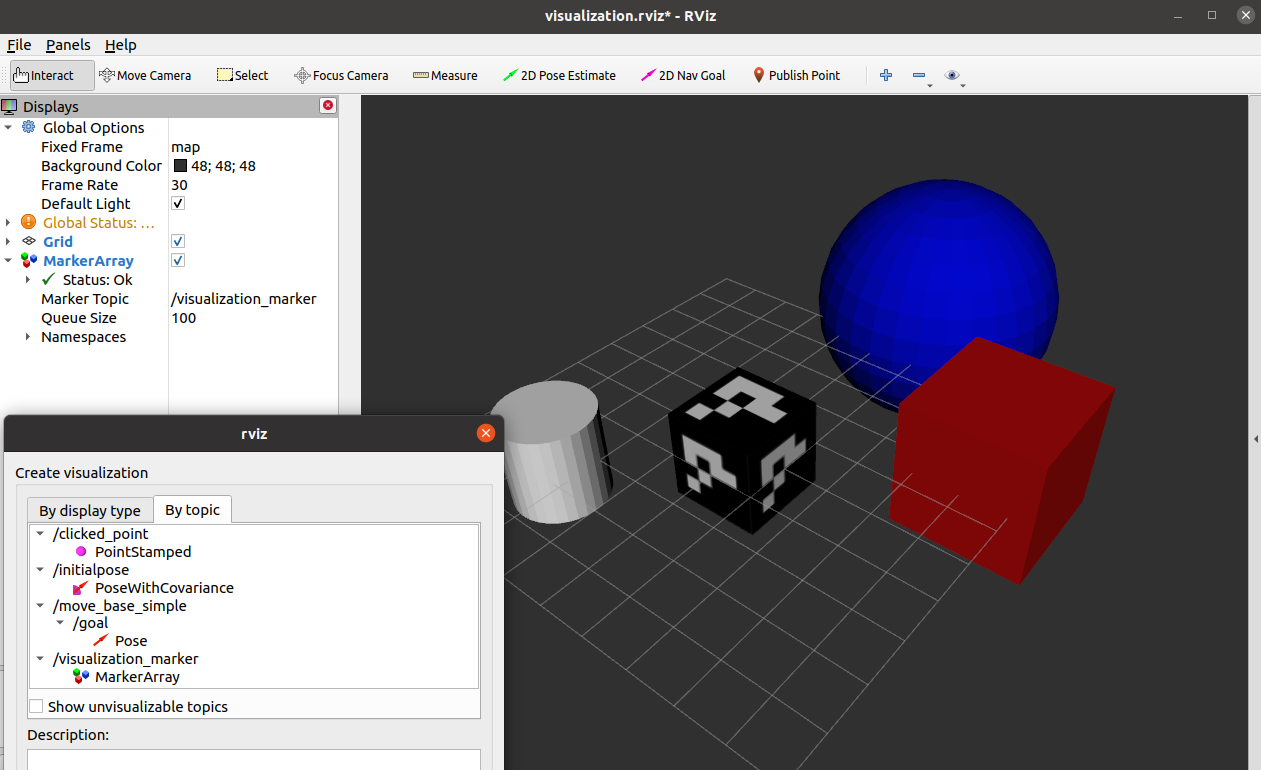
Based on the visualization_msgs markers of RViz I wrote a small package that makes it easy to load meshes into RViz as textured objects.
It simply loads all files which were put inside its meshes folder and publishes them to the visualization_marker topic. And even dynamically! When a new object is added to the folder, it appears (or is published) in RViz. If an object is deleted, it also disappears from the published models.
It also contains a launch file which just takes everything which is inside the meshes folder, opens up RViz with a suitable perspektive and visualizes the 3D files.
Just check it out here: https://github.com/vonunwerth/RVizMeshVisualizer
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.