
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
So here is the basic procedure:
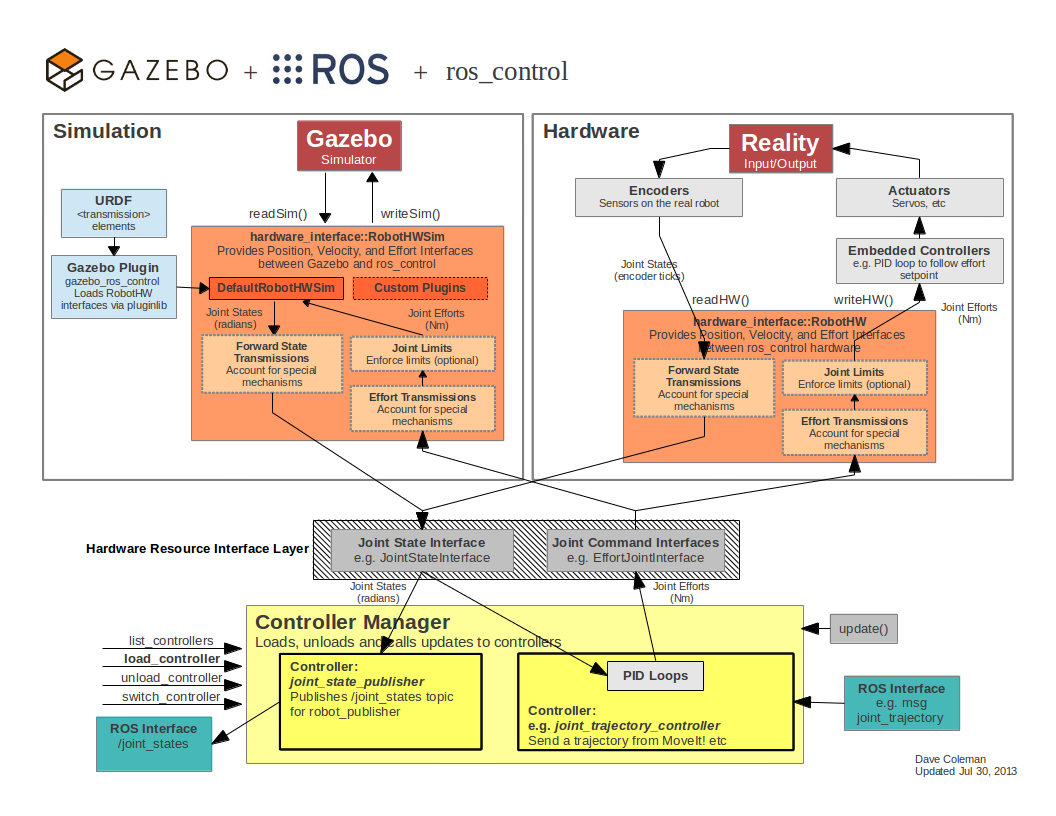
Below diagram shows how ros control (diff drive controller, joint trjaectory controller, joint position/velocity controller) can be easily used in between both real hardware and simulated hardwre (gazebo):
 1. See if Kuka KR5 already provides any ROS package as hardware interface, if yes jsut using that will sove all issue
2. If not, than you will have to implement custom hardware_interface for your Kuka KR5 robot so that your ros controller eg. joint trajectory controller can control it through moveit in your case.
Here is the link/tutorial in which you can create your own hardware interface any robot in real = Here
1. See if Kuka KR5 already provides any ROS package as hardware interface, if yes jsut using that will sove all issue
2. If not, than you will have to implement custom hardware_interface for your Kuka KR5 robot so that your ros controller eg. joint trajectory controller can control it through moveit in your case.
Here is the link/tutorial in which you can create your own hardware interface any robot in real = Here
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
