
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I can't answer correctly what will happen to the delay, but every ROS message has a timestamp attached to it. So maybe you could try to send a dummy message and compare the timestamps of sent and received messages. Maybe look into the this answer. Hope it helps!
| | 2 | No.2 Revision |
I can't answer correctly what will happen to the delay, but every ROS message has a timestamp attached to it. So maybe you could try to send a dummy message and compare the timestamps of sent and received messages. Maybe look into the this answer. Hope it helps!
Edit1: As far as I know it should work similar to image below
| | 3 | No.3 Revision |
I can't answer correctly what will happen to the delay, but every ROS message has a timestamp attached to it. So maybe you could try to send a dummy message and compare the timestamps of sent and received messages. Maybe look into the this answer. Hope it helps!
Edit1: As far as I know it should work similar to image below
below,
If I am wrong please tell me.
| | 4 | No.4 Revision |
I can't answer correctly what will happen to the delay, but every ROS message has a timestamp attached to it. So maybe you could try to send a dummy message and compare the timestamps of sent and received messages. Maybe look into the this answer. Hope it helps!
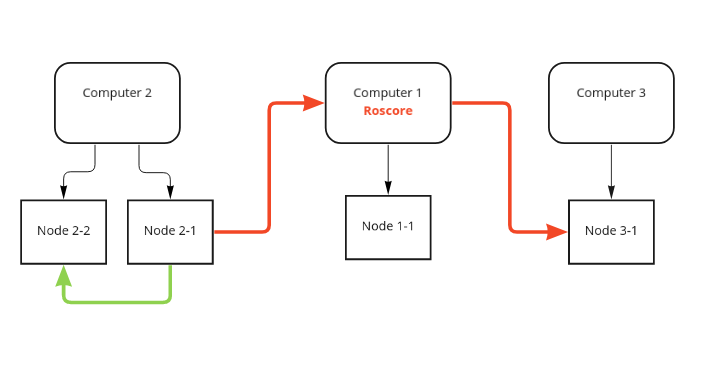
Edit1: As far as I know it should work similar to image below,
If I am wrong please tell me.
Edit2: So, roscore registers all to all but communication between nodes/messages are directly connected. 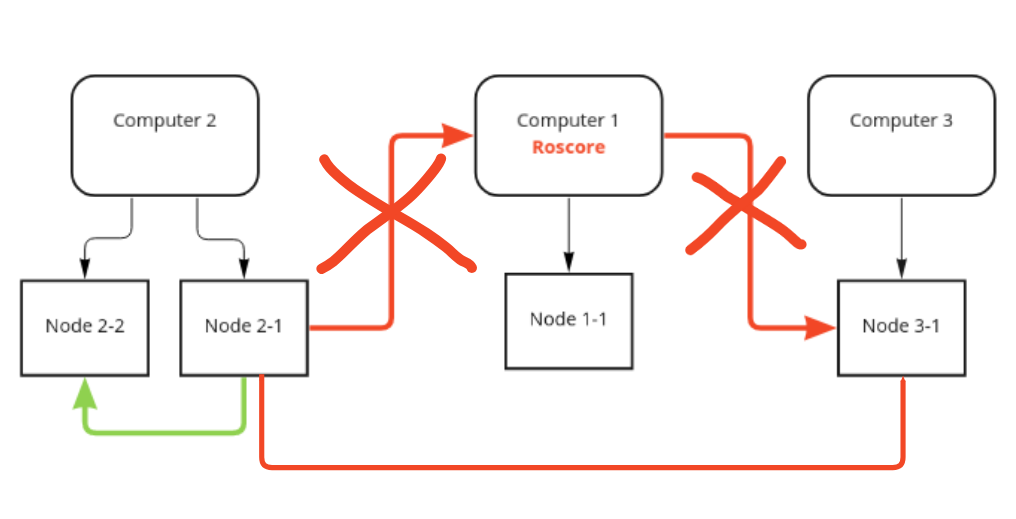
| | 5 | No.5 Revision |
I can't answer correctly what will happen to the delay, but every ROS message has a timestamp attached to it. So maybe you could try to send a dummy message and compare the timestamps of sent and received messages. Maybe look into the this answer. Hope it helps!
Edit1: As far as I know it should work similar to image below,
If I am wrong please tell me.
Edit2: So, roscore registers all to all but communication between nodes/messages are directly connected.
| | 6 | No.6 Revision |
I can't answer correctly what will happen to the delay, but every ROS message has a timestamp attached to it. So maybe you could try to send a dummy message and compare the timestamps of sent and received messages. Maybe look into the this answer. Hope it helps!
Edit1: As far as I know it should work similar to image below,
If I am wrong please tell me.
me.
Edit2: So, roscore registers all to all but communication between nodes/messages are directly connected.
| | 7 | No.7 Revision |
I can't answer correctly what will happen to the delay, but every ROS message has a timestamp attached to it. So maybe you could try to send a dummy message and compare the timestamps of sent and received messages. Maybe look into the this answer. Hope it helps!
Edit1: As far as I know it should work similar to image below, If I am wrong please tell me.
Edit2: So, roscore registers all to all but communication between nodes/messages are directly connected.
Here are some links that could help
1https://atlas-itn.eu/wp-content/uploads/2021/10/ROS_multiple_machine_final.pdf
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.