
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Read carefully this guide to ROS Navigation tuning:
https://kaiyuzheng.me/documents/navguide.pdf
It will explain you a lot of parameters of ROS Navigation stack.
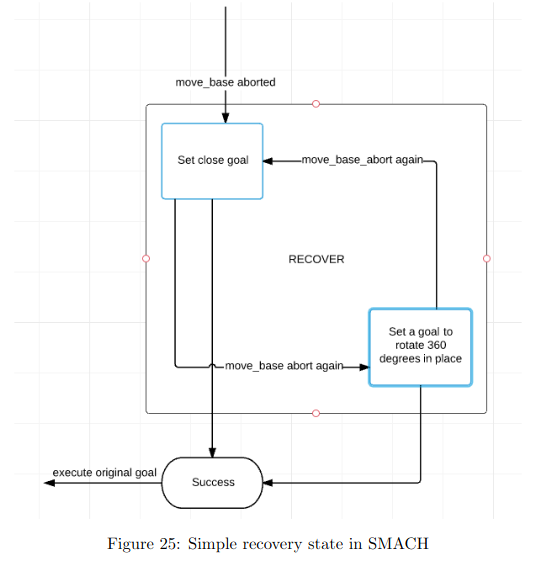
I think that the rotations you have observed are a part of 6 Recovery behaviors:
6 Recovery Behaviors
An annoying thing about robot navigation is that the robot may get stuck. Fortunately, the navigation stack has recovery behaviors built-in. Even so, sometimes the robot will exhaust all available recovery behaviors and stay still. Therefore, we may need to figure out a more robust solution.
Types of recovery behaviors ROS navigation has two recovery behaviors. They are clear costmap recovery and rotate recovery. Clear costmap recovery is basically reverting the local costmap to have the same state as the global costmap. Rotate recovery is to recover by rotating 360 degrees in place.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
