
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Easiest way to find source code for released (and indexed) packages would be index.ros.org.
For turtlesim specifically: index.ros.org/p/turtlesim.
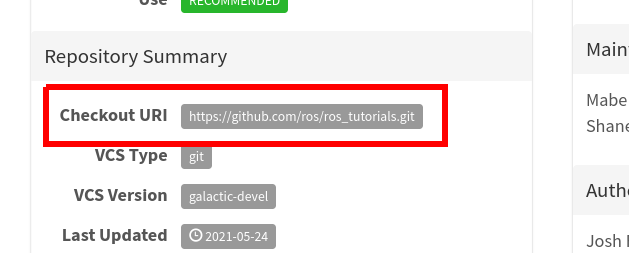
Then find the Checkout URI in the Repository Summary box.
| | 2 | No.2 Revision |
Easiest way to find source code for released (and indexed) packages would be index.ros.org.
For turtlesim specifically: index.ros.org/p/turtlesim.
Then find the Checkout URI in the Repository Summary box.box.:
| | 3 | No.3 Revision |
Easiest way to find source code for released (and indexed) packages would be index.ros.org.
For turtlesim specifically: index.ros.org/p/turtlesim.
Then find the Checkout URI in the Repository Summary box.:box:
| | 4 | No.4 Revision |
Easiest way to find source code for released (and indexed) packages would be index.ros.org.
For turtlesim specifically: index.ros.org/p/turtlesim.:
Then find 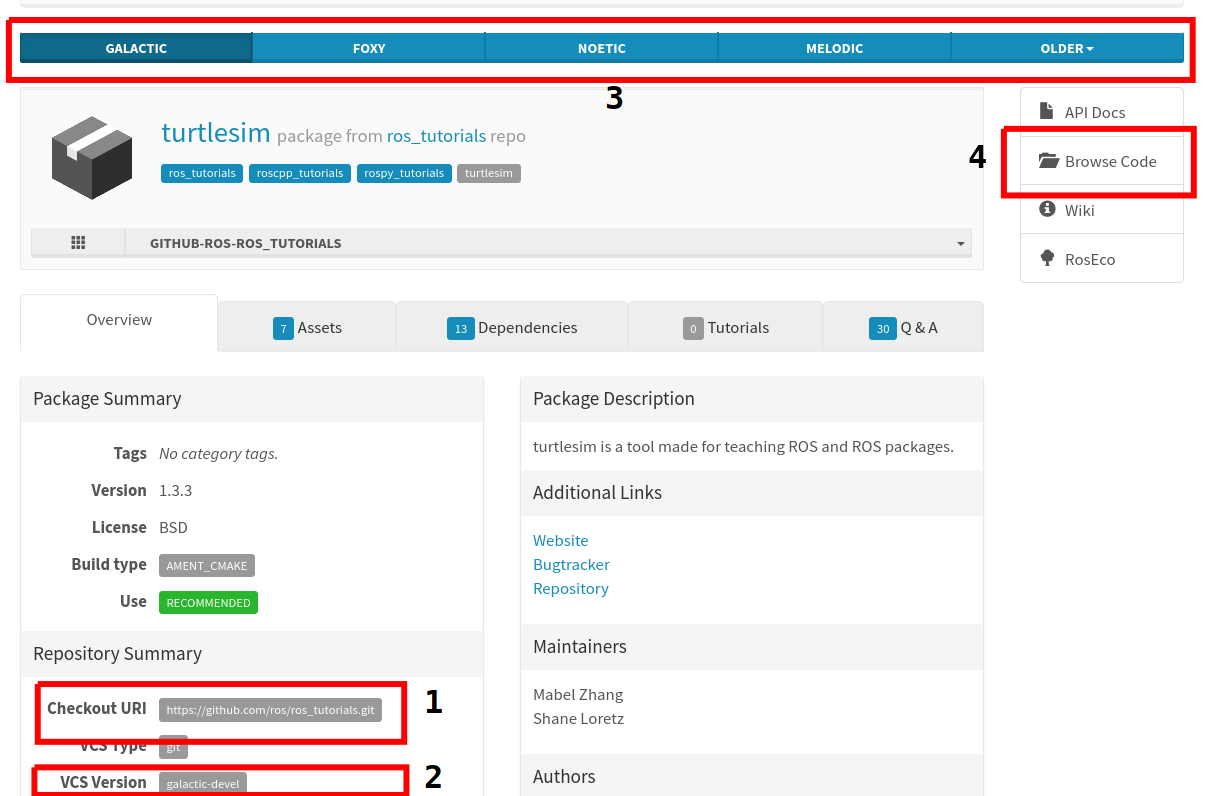
In the screenshot:
galactic-develfoxy-devel)
| | 5 | No.5 Revision |
Easiest way to find source code for released (and indexed) packages would be index.ros.org.
For turtlesim specifically: index.ros.org/p/turtlesim:
In the screenshot:
galactic-develfoxy-devel)Edit: for future readers: please always prefer to install the binary version of ROS packages, if at all possible.
Building ROS packages from sources is not the recommended way to install them and should not be your default.
| | 6 | No.6 Revision |
Edit: for future readers: please always prefer to install the binary version of ROS packages, if at all possible.
Building ROS packages from sources is not the recommended way to install them and should not be your default.
Easiest way to find source code for released (and indexed) packages would be index.ros.org.
For turtlesim specifically: index.ros.org/p/turtlesim:
In the screenshot:
galactic-develfoxy-devel)Edit: for future readers: please always prefer to install the binary version of ROS packages, if at all possible.
Building ROS packages from sources is not the recommended way to install them and should not be your default.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.