
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
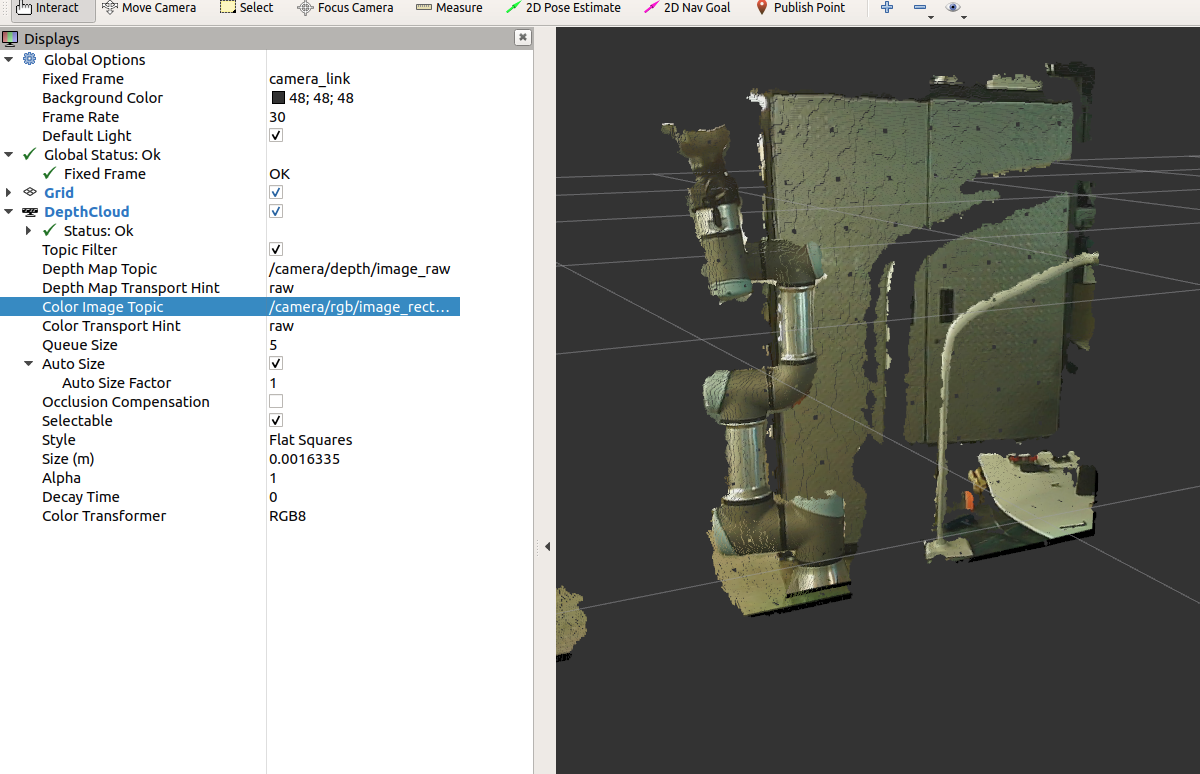
So I tried 3 things that significantly improved the depth/rgb alignment.
I just got another Orbbec Astra Pro and noticed the model name is "Astra Pro NL" while the one I have been using is just "Orbbec Astra." It turns out Orbbec's astra_camera package is meant to be compatible with the NL version (I didn't find this documented anywhere. Determined by device ID). I am now using the NL hardware.
I tried Orbbec's astra_launch package. It includes launch files that just call the astra_camera nodes. roslaunch astra_launch astrapro.launch
I changed my depth topic to /camera/depth/image_raw. Interestingly, this one seems to work much better than the "rectified" depth image (maybe my depth callibration parameters aren't valid).
| | 2 | No.2 Revision |
So I tried 3 things that significantly improved the depth/rgb alignment.
I just got another Orbbec Astra Pro and noticed the model name is "Astra Pro NL" while the one I have been using is just "Orbbec Astra." "Astra Pro." It turns out Orbbec's astra_camera package is meant to be compatible with the NL version (I didn't find this documented anywhere. Determined by device ID). I am now using the NL hardware.
I tried Orbbec's astra_launch package. It includes launch files that just call the astra_camera nodes. roslaunch astra_launch astrapro.launch
I changed my depth topic to /camera/depth/image_raw. Interestingly, this one seems to work much better than the "rectified" depth image (maybe my depth callibration parameters aren't valid).
| | 3 | No.3 Revision |
So I tried 3 things that significantly improved the depth/rgb alignment.
I just got another Orbbec Astra Pro and noticed the model name is "Astra Pro NL" while the one I have been using is just "Astra Pro." It turns out Orbbec's astra_camera package is meant to be compatible with the NL version (I didn't find this documented anywhere. Determined by device ID). I am now using the NL hardware.
I tried Orbbec's astra_launch package. It includes launch files that just call the astra_camera nodes. roslaunch astra_launch astrapro.launch
I changed my depth topic to /camera/depth/image_raw. Interestingly, this one seems to work much better than the "rectified" depth image (maybe my depth callibration parameters aren't valid).
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.