
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
If you see the norm of the linear_acceleration, norm(x: 1.93930334473, y: 0.0191536132812, z: 9.28710823975) = 9.4874, (reasonable). Also, as you see the orientation is not exactly [0,0,0,1], the linear acceleration value in X-direction is the component of gravity in the x-direction. Note, IMU gives you the be acceleration in the body-frame. Hopefully, the following img might convey it better,
| | 2 | No.2 Revision |
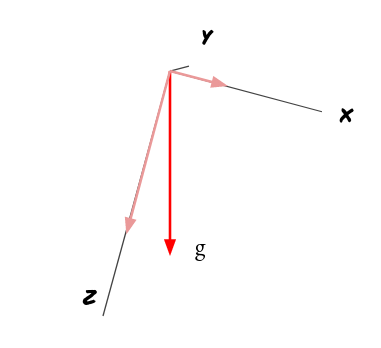
If you see the norm of the linear_acceleration, norm(x: 1.93930334473, y: 0.0191536132812, z: 9.28710823975) = 9.4874, (reasonable). Also, as you see the orientation is not exactly [0,0,0,1], the linear acceleration value in X-direction is the component of gravity in the x-direction. Note, IMU gives you the be acceleration in the body-frame. Hopefully, the following img might convey it better,
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.