
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
That bag contains already a TF tree, no need to publish another static transform for the camera. On a robot, the frame_id should be the base frame of the robot. In this case, the base frame is base_footprint. Remove your static transform publisher for camera_link to stereo_link and set the following for stereo_odometry node:
<param name="frame_id" type="string" value="base_footprint"/>
Here is the tf tree in the bag:
$ roscore
$ rosparam set use_sim_time true
$ rosbag play --clock stereo_outdoorA.bag
$ rosrun tf_view_frames
$ evince frames.pdf
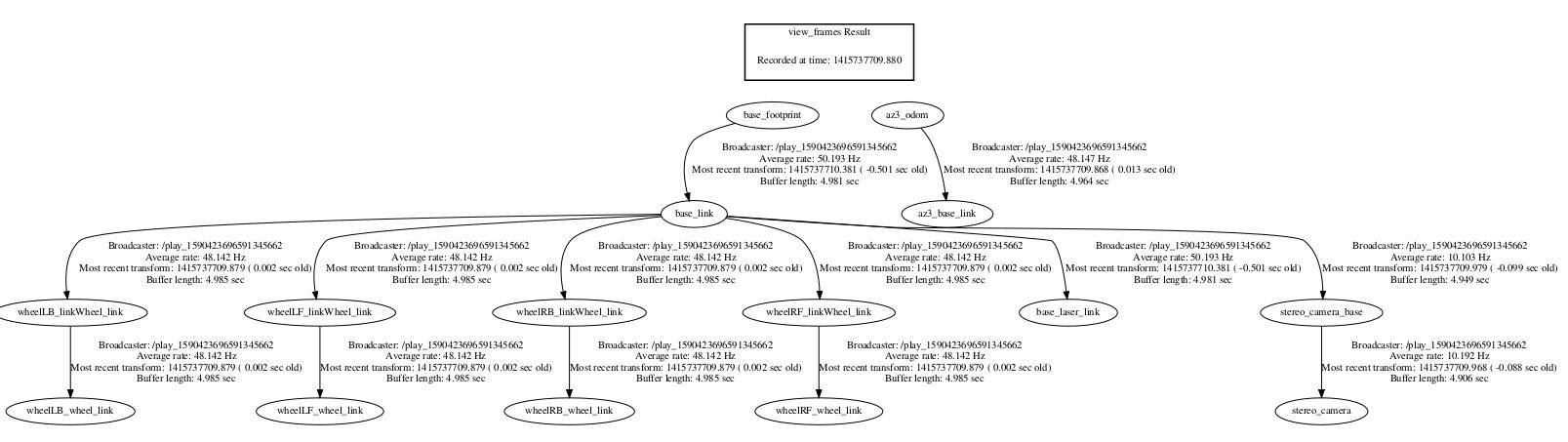
(Note that in this example, wheel odometry of azimut was detached of the TF tree because we are using visual odometry instead)
If you don't have a robot urdf, you could look at this example.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
