
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hello,
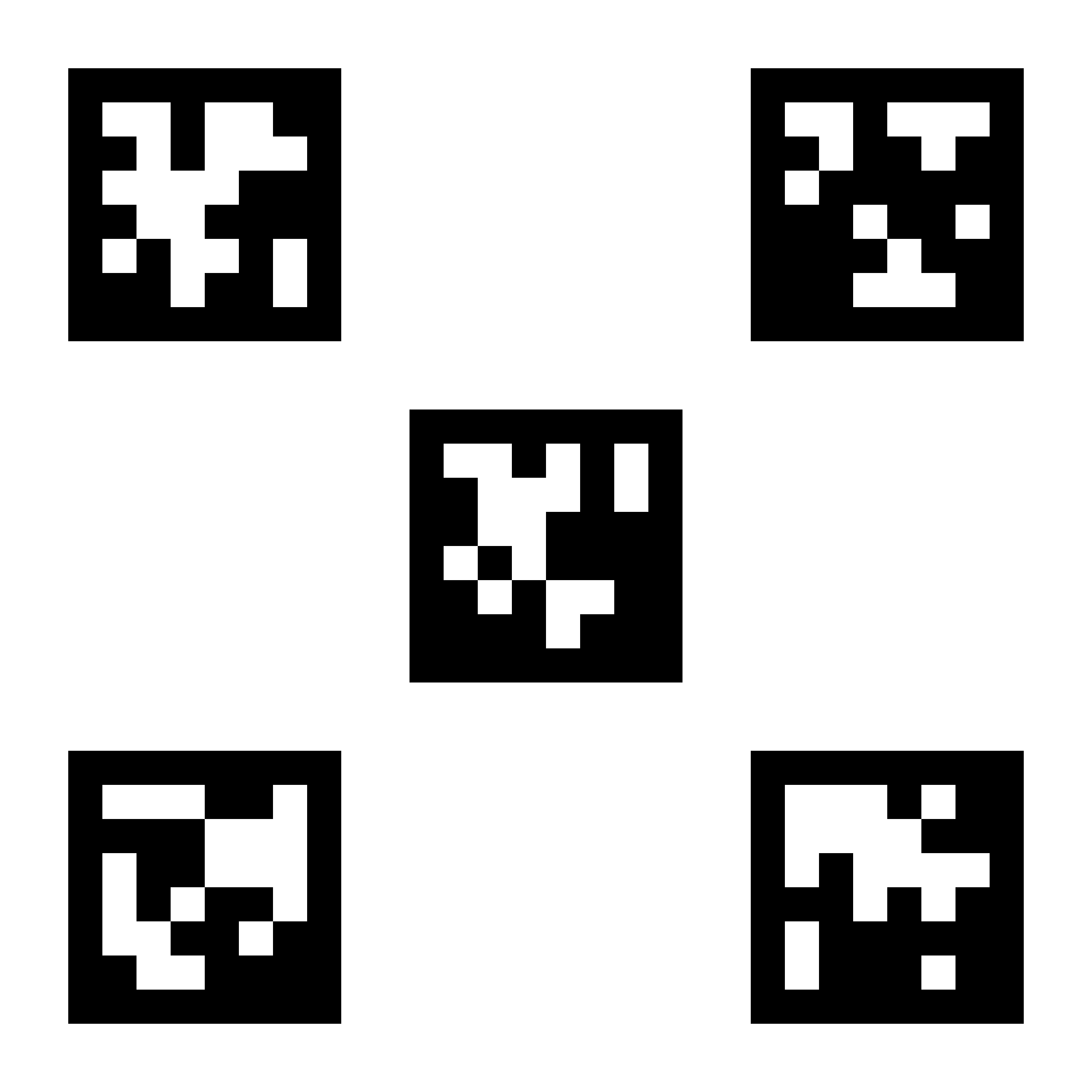
I created a file in gimp that is almost the same as the calibration bundle, shown at http://wiki.ros.org/apriltag_ros/Tutorials/Bundle%20calibration
Before printing, it would need to be scaled, each tag right now is 10x10 pixels.
Also the tag_bundle parameter in the tutorial should be changed. right now, it is not symetric, whereas the one I created is symettric.
I tried attaching xcf file, but answers.ros.org would not accept it, so I put it in a github repo.
Both the png file and xcf file can be accessed: https://github.com/altineller/documentation_images/tree/master/apriltag_ros
png file is attached below, it will have to be printed considering scale.
Best Regards, C.A.
| | 2 | No.2 Revision |
Hello,
I created a file in gimp that is almost the same as the calibration bundle, shown at http://wiki.ros.org/apriltag_ros/Tutorials/Bundle%20calibration
Before printing, it would need to be scaled, each tag right now is 10x10 pixels.
Also the tag_bundle parameter in the tutorial should be changed. right now, it is not symetric, whereas the one I created is symettric.
I tried attaching xcf file, but answers.ros.org would not accept it, so I put it in a github repo.
Both the png file and xcf file can be accessed: https://github.com/altineller/documentation_images/tree/master/apriltag_ros
png file is attached below, it will have to be printed considering scale.
C:\fakepath\bundle.pngbundle.png
Best Regards, C.A.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}