
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
rtabmap requires rectified stereo images as input. There are a lot of right images missing from the bag, but I'm still able to try stereo_image_proc to rectify the images:
$ rosrun stereo_image_proc stereo_image_proc /left/image_raw:=/camera/fisheye1/image_raw /left/camera_info:=/camera/fisheye1/camera_info /right/image_raw:=/camera/fisheye2/image_raw /right/camera_info:=/camera/fisheye2/camera_info
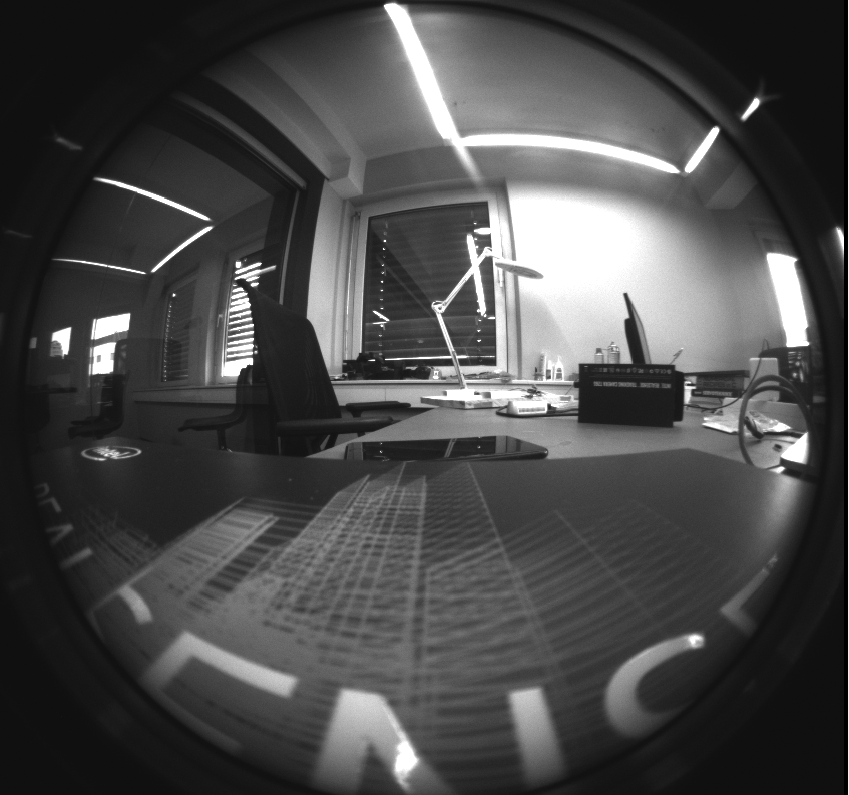
Raw:
Rectified:
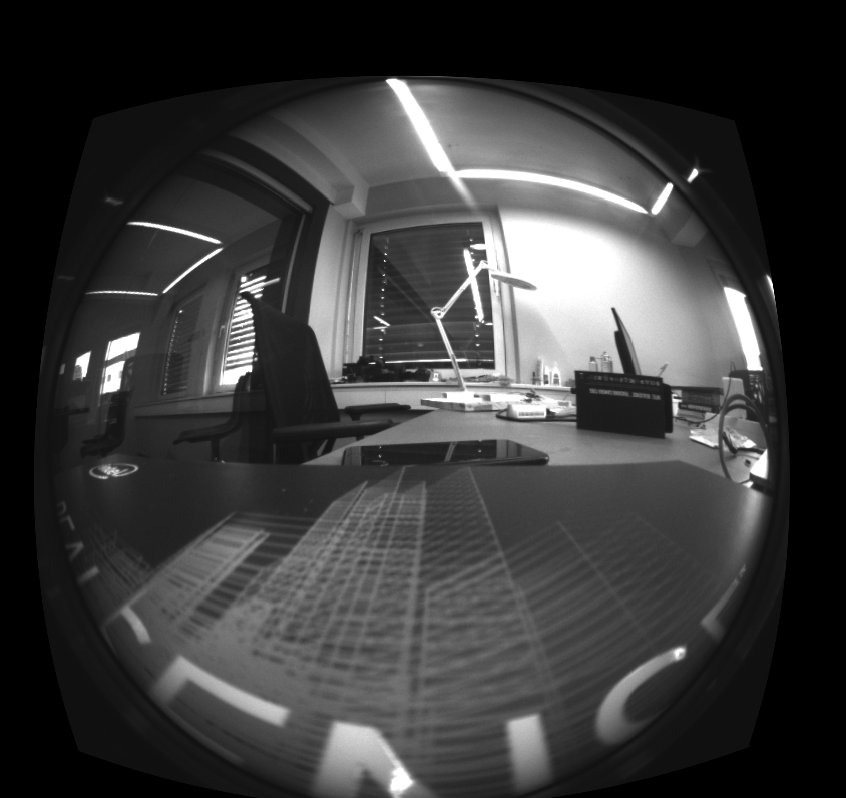
As you can see, the rectification doesn't work with the current calibration info. Here is a tutorial to calibrate stereo cameras: http://wiki.ros.org/camera_calibration/Tutorials/StereoCalibration
cheers,
Mathieu
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
