
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
From this warning:
[ WARN] (2018-08-21 15:29:10.585) Memory.cpp:749::update() The working memory is empty and the memory is not incremental (Mem/IncrementalMemory=False), no loop closure can be detected! Please set Mem/IncrementalMemory=true to increase the memory with new images or decrease the STM size (which is 1 including the new one added).
caused by this argument in the launch file:
<!-- Localization-only mode -->
<arg name="localization" default="true"/>
Set to false to do SLAM, otherwise there is no map constructed, thus no octomap. This should be only used when there is already a map constructed. When setting localization to true, it sets Mem/IncrementalMemory=False.
Also, don't include rtabmap.launch if you explicitly start stereo_odometry and rtabmap nodes, or use only rtabmap.launch (which starts stereo_odometry and rtabmap nodes, see original stereo_mapping.launch). You may have two stereo_odometry nodes and two rtabmap nodes started.
| | 2 | No.2 Revision |
From this warning:
[ WARN] (2018-08-21 15:29:10.585) Memory.cpp:749::update() The working memory is empty and the memory is not incremental (Mem/IncrementalMemory=False), no loop closure can be detected! Please set Mem/IncrementalMemory=true to increase the memory with new images or decrease the STM size (which is 1 including the new one added).
caused by this argument in the launch file:
<!-- Localization-only mode -->
<arg name="localization" default="true"/>
Set to false to do SLAM, otherwise there is no map constructed, thus no octomap. This should be only used when there is already a map constructed. When setting localization to true, it sets Mem/IncrementalMemory=False.
Also, don't include rtabmap.launch if you explicitly start stereo_odometry and rtabmap nodes, or use only rtabmap.launch (which starts stereo_odometry and rtabmap nodes, see original stereo_mapping.launch). You may have two stereo_odometry nodes and two rtabmap nodes started.
EDIT
I am not sure what you are expecting from the OctoMap and stereo, but the result you have seems okay. I took your launch file and tested on the dataset of this tutorial. I added the following at the top of your launch file to stream images from that dataset:
<!-- stereo_20Hz directory -->
<arg name="dir" default="$(env HOME)/Downloads/stereo_20Hz" />
<!-- Run stereo_sequence_publisher to publish synchronized images -->
<node name="stereo_pub" pkg="bag_tools" type="stereo_sequence_publisher.py" output="screen">
<param name="image_dir_left" value="$(arg dir)/left"/>
<param name="image_dir_right" value="$(arg dir)/right"/>
<param name="file_pattern" value="*.jpg"/>
<param name="camera_info_file_left" value="$(arg dir)/stereo_20Hz_ros_left.yaml"/>
<param name="camera_info_file_right" value="$(arg dir)/stereo_20Hz_ros_right.yaml"/>
<param name="frequency" value="20"/>
<remap from="/stereo_camera/left/image_color" to="/stereo_camera/left/image_raw" />
<remap from="/stereo_camera/right/image_color" to="/stereo_camera/right/image_raw" />
<remap from="/stereo_camera/left/camera_info" to="/stereo_camera/left/camera_info" />
<remap from="/stereo_camera/right/camera_info" to="/stereo_camera/right/camera_info" />
</node>
<node pkg="tf" type="static_transform_publisher" name="dummy_transform"
args="0 0 0 0 0 0 stereo_camera/left stereo_20Hz_left 100" />
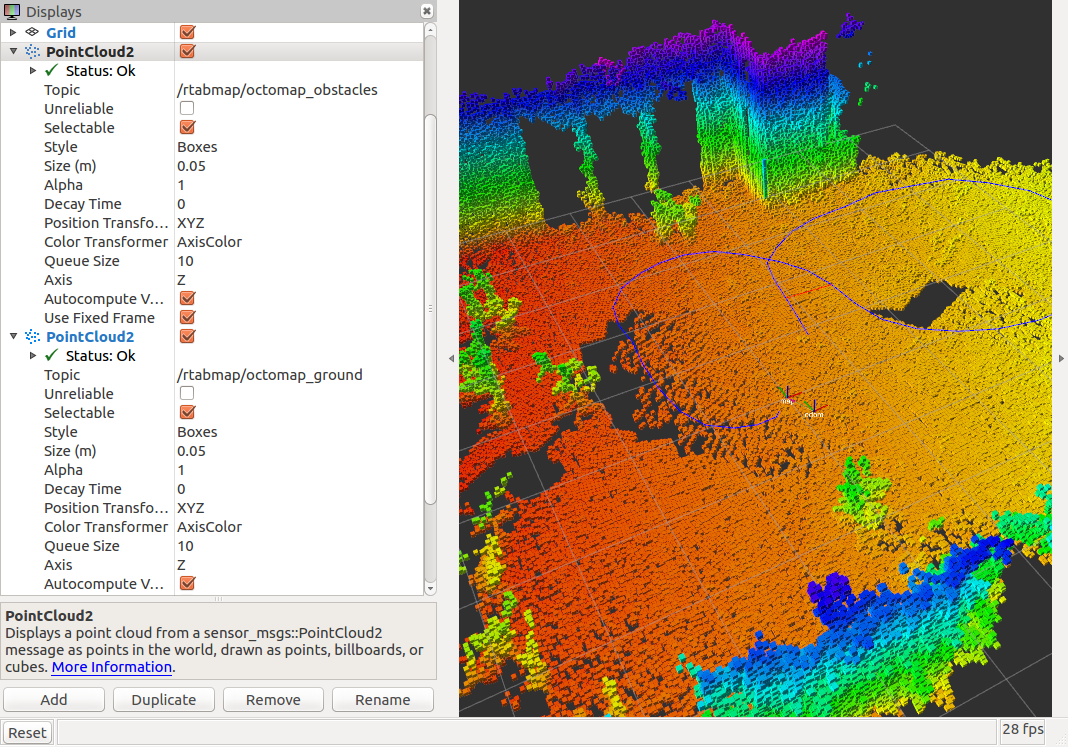
Note that in this dataset, the ground is textured, so stereo can actually see the ground.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
