
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi, If you are able to view the pointclouds in rviz, then you might have just overlooked something.
Check rxgraph if the nodes are connected by correct topics.
Try to echo the topic /cmd_vel to see if the keystrokes are giving the msgs.
Check the launch file if the topics are correct.
You should be able to diagnose something with all these checks. Hope it helps
Thanks, Karthik
| | 2 | No.2 Revision |
Hi, If you are able to view the pointclouds in rviz, then you might have just overlooked something.
Check rxgraph if the nodes are connected by correct topics.
Try to echo the topic /cmd_vel to see if the keystrokes are giving the msgs.
Check the launch file if the topics are correct.
You should be able to diagnose something with all these checks. Hope it helps
Thanks, Karthik
Following are the checks that you can do 1. Check the .bashrc of the both workstation and turtlebot_lappy if they are concurrent with the http://www.ros.org/wiki/Robots/TurtleBot/Network%20Setup 2. You may check the network setup by running the turtlesim on turtlebot_lappy and teleop it from the workstation. This should work fine if network is perfectly setup. I explain the steps as follows a)In your turtlebot_lappy
roscore
and
rosrun turtlesim turtlesim_node
b)From your workstation
rosrun turtlesim turtle_teleop_key
Check if the turtle is moving in turtlebot_lappy when u press the arrow keys in workstation.
Once this is working. Then i guess you may test the turtlebot with similar procedure.
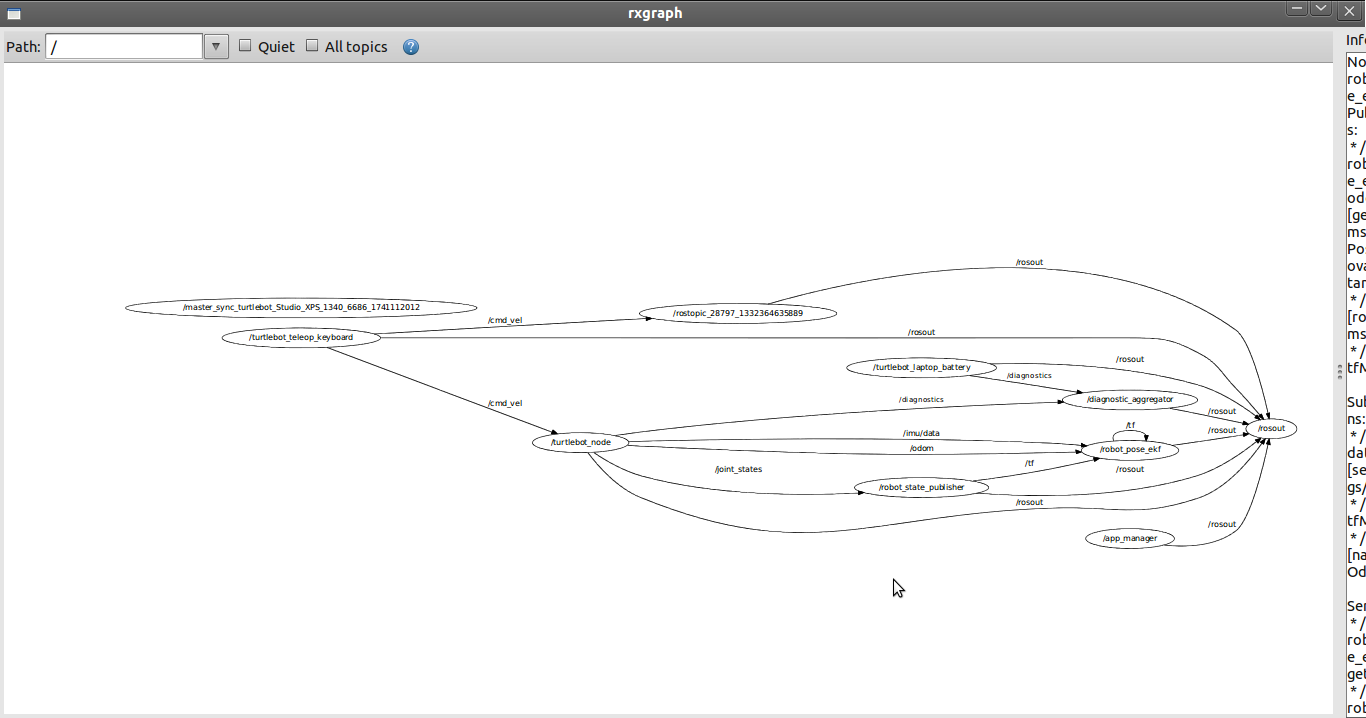
The rxgraph should look like below for the turtlebot teleoperated from workstation
Hope it helps
Karthik
| | 3 | No.3 Revision |
Hi, If you are able to view the pointclouds in rviz, then you might have just overlooked something.
Check rxgraph if the nodes are connected by correct topics.
Try to echo the topic /cmd_vel to see if the keystrokes are giving the msgs.
Check the launch file if the topics are correct.
You should be able to diagnose something with all these checks. Hope it helps
Thanks, Karthik
Following are the checks that you can do
1. do
Check the .bashrc of the both workstation and turtlebot_lappy if they are concurrent with the http://www.ros.org/wiki/Robots/TurtleBot/Network%20Setup
2.
You may check the network setup by running the turtlesim on turtlebot_lappy and teleop it from the workstation. This should work fine if network is perfectly setup. I explain the steps as follows
follows
a)In your turtlebot_lappy
roscore
and
rosrun turtlesim turtlesim_node
b)From your workstation
rosrun turtlesim turtle_teleop_key
Check if the turtle is moving in turtlebot_lappy when u press the arrow keys in workstation.
Once this is working. Then i guess you may test the turtlebot with similar procedure.
The rxgraph should look like below for the turtlebot teleoperated from workstation
Hope it helps
Karthik
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
