
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
In agreement with lucascoelho, I cite an example. If you check out this tutorial, http://www.ros.org/wiki/stage/Tutorials/IntroductiontoStageControllers. If you have a look at the roomba-wander.world file, then
pose [ -8 6 0 0 ]
is the pose [x y z alpha] that you are looking for; x = -8, y = 6, z = 0 and alpha = 0.
| | 2 | No.2 Revision |
In agreement with lucascoelho, I cite an example. If you check out this tutorial, http://www.ros.org/wiki/stage/Tutorials/IntroductiontoStageControllers. If you and have a look at the roomba-wander.world file, then
pose [ -8 6 0 0 ]
is the pose [x y z alpha] that you are looking for; x = -8, y = 6, z = 0 and alpha = 0.
| | 3 | No.3 Revision |
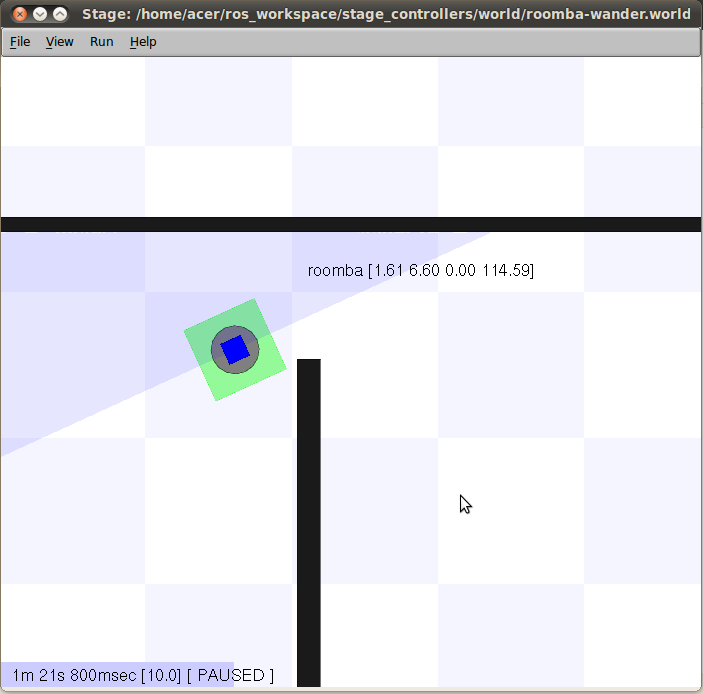
In agreement with lucascoelho, I cite an example. If you check out this tutorial, http://www.ros.org/wiki/stage/Tutorials/IntroductiontoStageControllers and have a look at the roomba-wander.world file, then
pose [ -8 6 0 0 ]
is the pose [x y z alpha] that you are looking for; x = -8, y = 6, z = 0 and alpha = 0.
One the simulation has started, you can see the realtime pose, by clicking on the robot.
| | 4 | No.4 Revision |
In agreement with lucascoelho, I cite an example. If you check out this tutorial, http://www.ros.org/wiki/stage/Tutorials/IntroductiontoStageControllers and have a look at the roomba-wander.world file, then
pose [ -8 6 0 0 ]
is the pose [x y z alpha] that you are looking for; x = -8, y = 6, z = 0 and alpha = 0.
One Once the simulation has started, you can see the realtime pose, by clicking on the robot.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
