
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
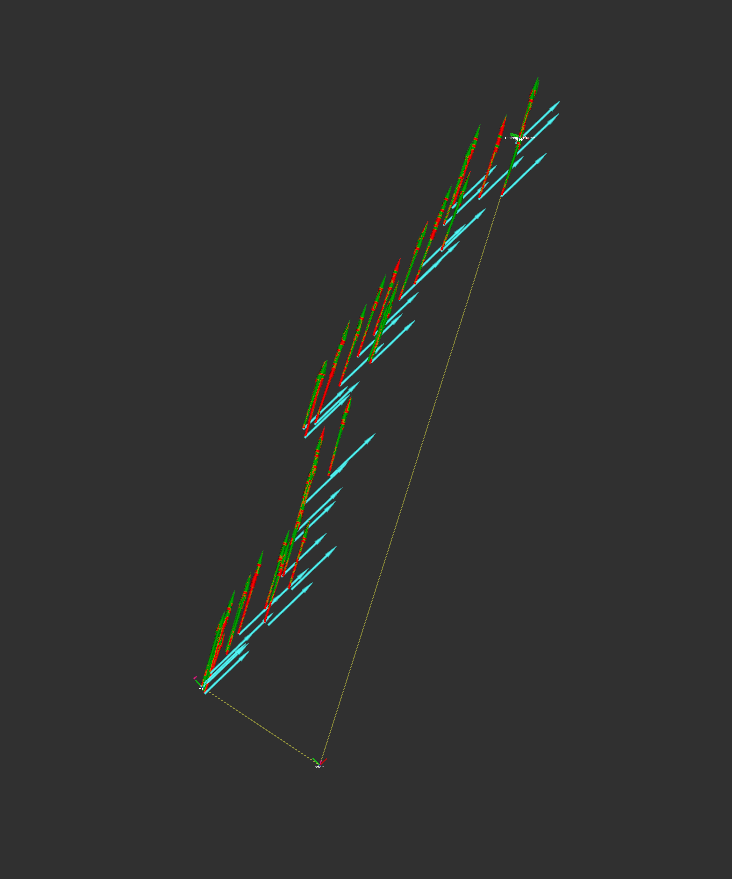
You are visualizing the wrong topic for the "local" data. Here's what I see when I visualize /odometry/filtered/local (green), /odometry/filtered/global (red), and /odometry/gps (blue):
rviz fixed_frame == map:
rviz fixed_frame == odom:
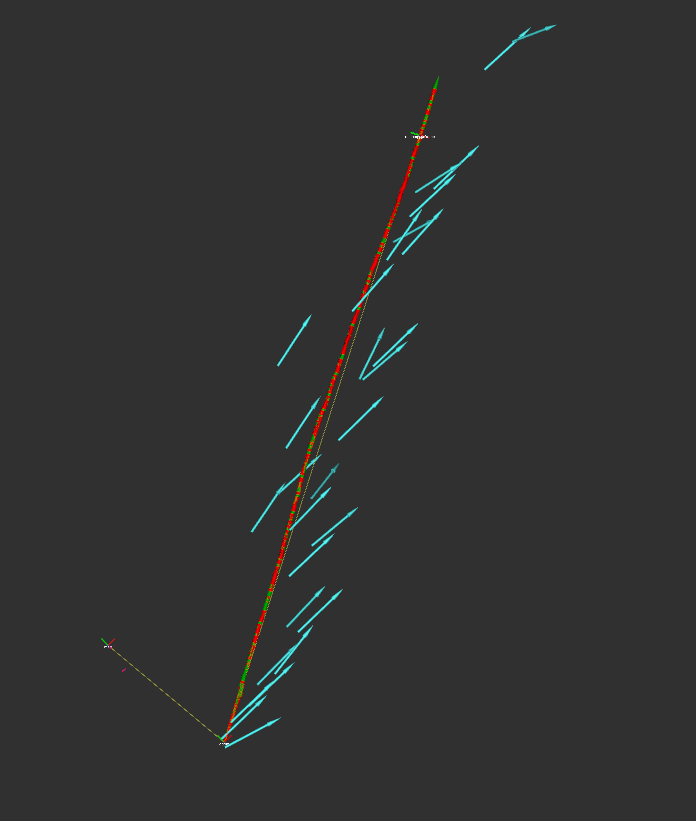
Both of those look completely correct to me. Your GPS is a bit noisy, but that's normal.
| | 2 | No.2 Revision |
You are visualizing the wrong topic for the "local" data. Here's what I see when I visualize /odometry/filtered/local (green), /odometry/filtered/global (red), and /odometry/gps (blue):
rviz fixed_frame == map:
rviz fixed_frame == odom:
Both of those look completely correct to me. Your GPS is a bit noisy, but that's normal.
EDIT in response to comments:
From the wiki:

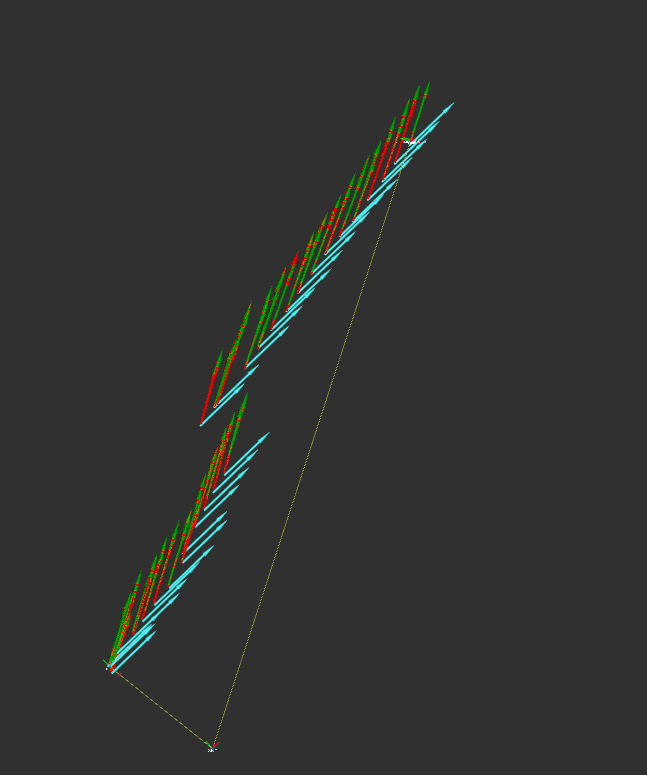
Visualization of raw GPS tracks:

| | 3 | No.3 Revision |
You are visualizing the wrong topic for the "local" data. Here's what I see when I visualize /odometry/filtered/local (green), /odometry/filtered/global (red), and /odometry/gps (blue):
rviz fixed_frame == map:
rviz fixed_frame == odom:
Both of those look completely correct to me. Your GPS is a bit noisy, but that's normal.
EDIT in response to comments:
From the wiki:
Visualization of raw GPS tracks:
EDIT 2 after more analysis:
I figured out why it's so much more jittery. You need to get rid of the 0.4 value in your bl_gps static transform:
<node pkg="tf2_ros" type="static_transform_publisher" name="bl_gps" args="0 0 0.0 0 0 0 base_link gps" />
That's a bug; I'll file a ticket. Thanks for the report!
Even with that fix, though, the direction of travel doesn't quite match the GPS. The robot has a tiny bit of lateral motion, which suggests something is not right with your IMU heading or the declination parameter.
| | 4 | No.4 Revision |
You are visualizing the wrong topic for the "local" data. Here's what I see when I visualize /odometry/filtered/local (green), /odometry/filtered/global (red), and /odometry/gps (blue):
rviz fixed_frame == map:
rviz fixed_frame == odom:
Both of those look completely correct to me. Your GPS is a bit noisy, but that's normal.
EDIT in response to comments:
From the wiki:
Visualization of raw GPS tracks:
EDIT 2 after more analysis:
I figured out why it's so much more jittery. You need to get rid of the 0.4 value for Z in your bl_gps static transform:
<node pkg="tf2_ros" type="static_transform_publisher" name="bl_gps" args="0 0 0.0 0 0 0 base_link gps" />
That's a bug; I'll file a ticket. Thanks for the report!
Even with that fix, though, the direction of travel doesn't quite match the GPS. The robot has a tiny bit of lateral motion, which suggests something is not right with your IMU heading or the declination parameter.
| | 5 | No.5 Revision |
You are visualizing the wrong topic for the "local" data. Here's what I see when I visualize /odometry/filtered/local (green), /odometry/filtered/global (red), and /odometry/gps (blue):
rviz fixed_frame == map:
rviz fixed_frame == odom:
Both of those look completely correct to me. Your GPS is a bit noisy, but that's normal.
EDIT in response to comments:
From the wiki:
Visualization of raw GPS tracks:
EDIT 2 after more analysis:
I figured out why it's so much more jittery. You need to get rid of the 0.4 value for Z in your bl_gps static transform:
<node pkg="tf2_ros" type="static_transform_publisher" name="bl_gps" args="0 0 0.0 0 0 0 base_link gps" />
That's a bug; I'll file a ticket. Thanks for the report!
Even with that fix, though, the direction of travel doesn't quite match the GPS. The robot has a tiny bit of lateral motion, which suggests something is not right with your IMU heading or the declination parameter.
EDIT 3 to answer more questions:
So you're saying the path is more accurate/in line with the GPS readings when you use the negative declination value (-0.0684)? If so, yes, that makes sense, and it's what I suggested in the comments. Your deviation from "true north" is 0.0684 radians clockwise:
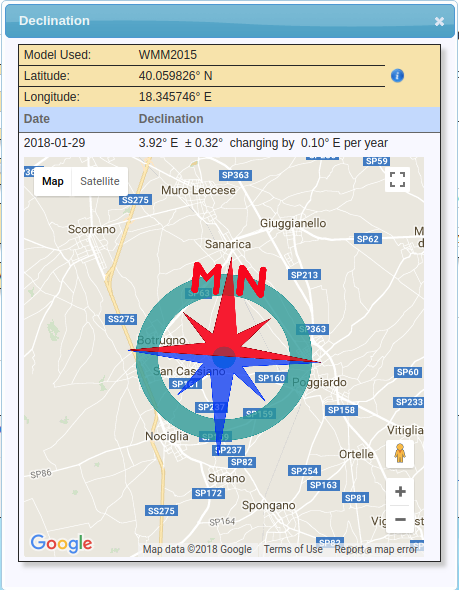
Clockwise rotation in an ENU frame is negative, hence the -0.0684 declination value. I realize r_l uses different standards than geographic services, but it's just so that the nodes handle rotations consistently.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
