
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi there! I've done this before, you need to use QT, and communicate via qt_ros. If you don't know what QT is, well it's an IDE for C++ that can be configured to work with ROS (https://ros-industrial.github.io/ros_qtc_plugin/) Once you set QT you can debug your programs, build, and create workspaces with QT.
But if you install QT just like in the link provided above, you'll also have QT Designer that allows you to design C++ interfaces very easily (Drag and Drop and configure) so you'll have something like this:
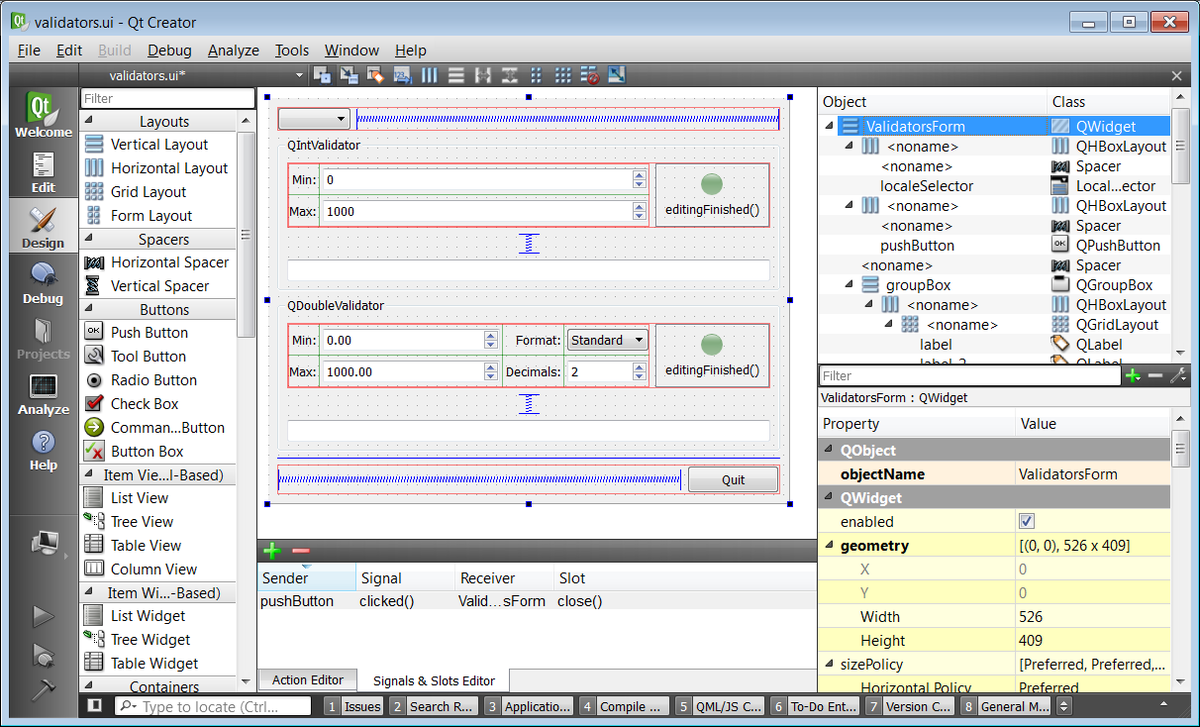
Once you design your interface and have it as an .UI extension, you can load that and publish/subscribe to different topics within ROS. Check the tutorials: http://wiki.ros.org/qt_create/Tutorials/Qt%20App%20Templates
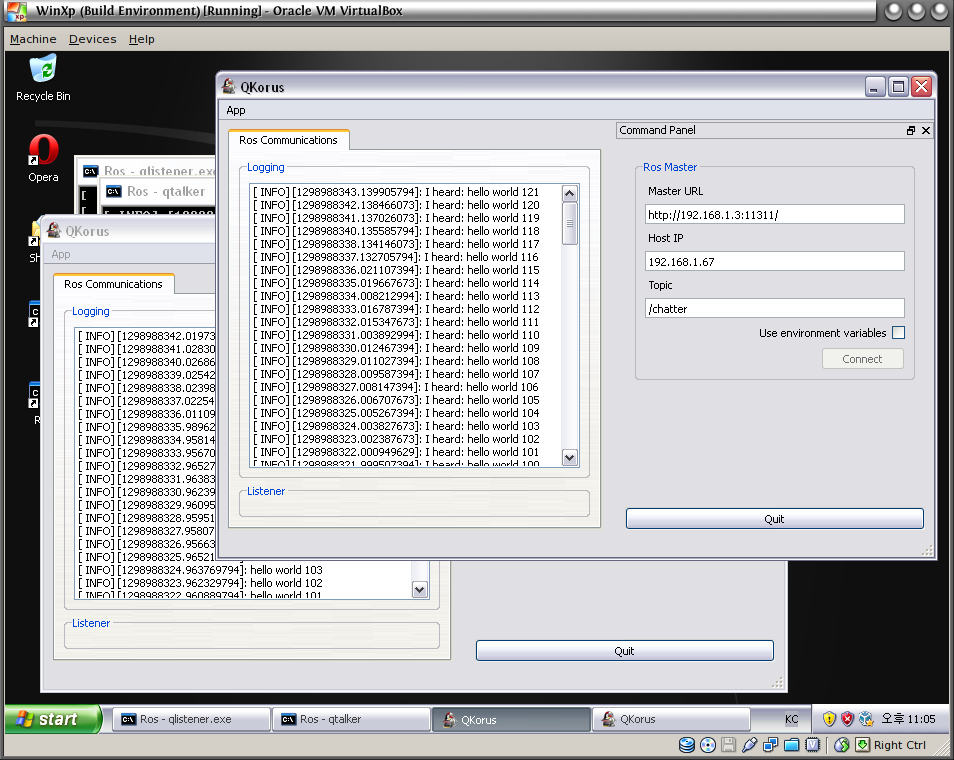
But you'll have a nice interface with ROS topics communication, which is what I think you want to achieve:
Good luck and happy coding!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
