
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Going off of the solution that @tmoore gave, i wanted to share the entire setup that i have which is to big to fit in a comment. FYI, the code changes i made are most likely not the proper way of doing things, but the launch file configurations are good.
Here is a pastebin link to my launch file for Node 1
And another link to my launch file for Node 2
Im first trying to get this to work in a gazebo simulation before trying it on my actual robot. Theres a few things to note that i changed:
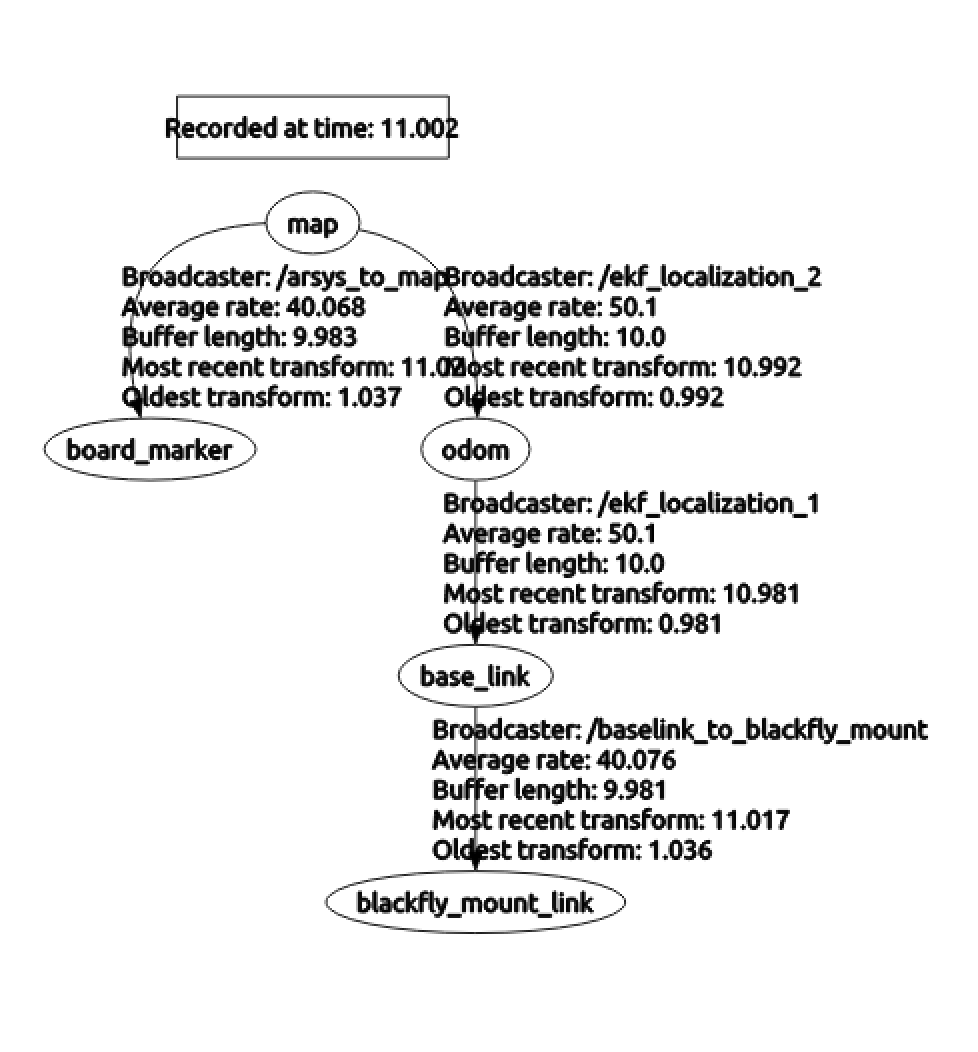
geometry_msgs/PoseWithCovarianceStamped instead of a geometry_msgs/PoseMy robot's static transforms are defined like this (i tried using tf2, but i couldnt get the proper rotation of the camera's optical frame unless i used the original tf static publisher)
One thing i need to mention is that when lookup the static tf to apply to the ar_sys pose message, I only lookup base_link -> blackfly_mount_link , rather then blackfly_optical_link which has the rotations (in the attempt to proper conform to the ROS image standards because i couldnt figure out how to apply to rotation of the static transform lookup to the ar_sys poseMsg. So only the translation of the ar_sys pose message is now changed.
Here are a few pictures:
C:\fakepath\Screen Shot 2015-09-14 at 10.42.45 AM.png C:\fakepath\Screen Shot 2015-09-14 at 10.44.43 AM.png C:\fakepath\Screen Shot 2015-09-14 at 10.45.10 AM.png
| | 2 | No.2 Revision |
Going off of the solution that @tmoore gave, i wanted to share the entire setup that i have which is to big to fit in a comment. FYI, the code changes i made are most likely not the proper way of doing things, but the launch file configurations are good.
Here is a pastebin link to my launch file for Node 1
And another link to my launch file for Node 2
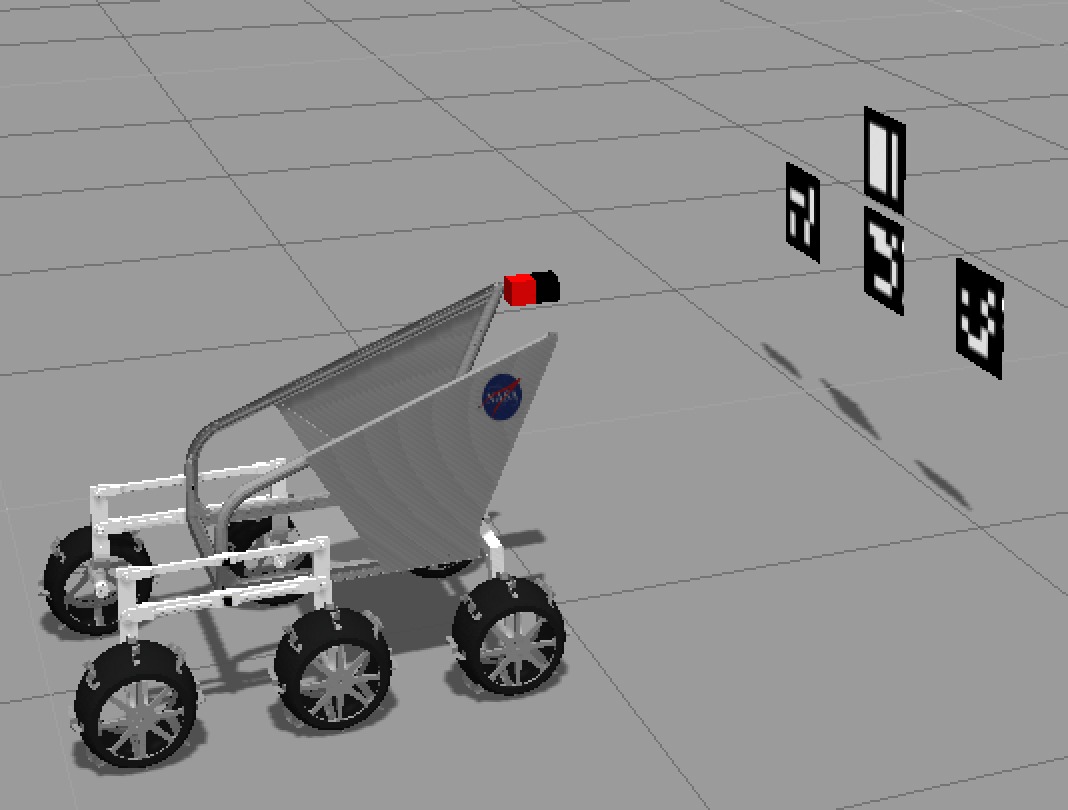
Im first trying to get this to work in a gazebo simulation before trying it on my actual robot. Theres a few things to note that i changed:
geometry_msgs/PoseWithCovarianceStamped instead of a geometry_msgs/PoseMy robot's static transforms are defined like this (i tried using tf2, but i couldnt get the proper rotation of the camera's optical frame unless i used the original tf static publisher)
One thing i need to mention is that when lookup the static tf to apply to the ar_sys pose message, I only lookup base_link -> blackfly_mount_link , rather then blackfly_optical_link which has the rotations (in the attempt to proper conform to the ROS image standards because i couldnt figure out how to apply to rotation of the static transform lookup to the ar_sys poseMsg. So only the translation of the ar_sys pose message is now changed.
Here are a few pictures:
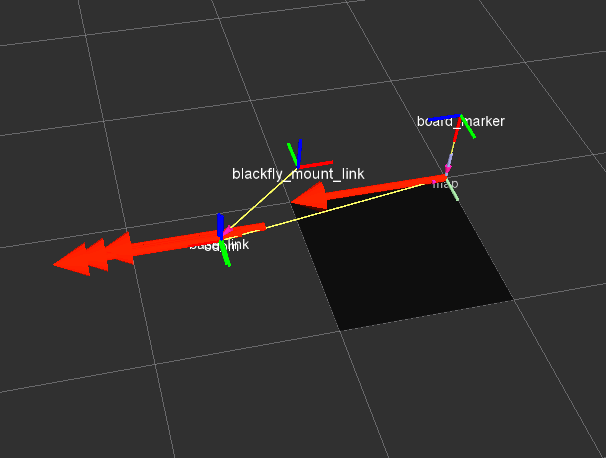
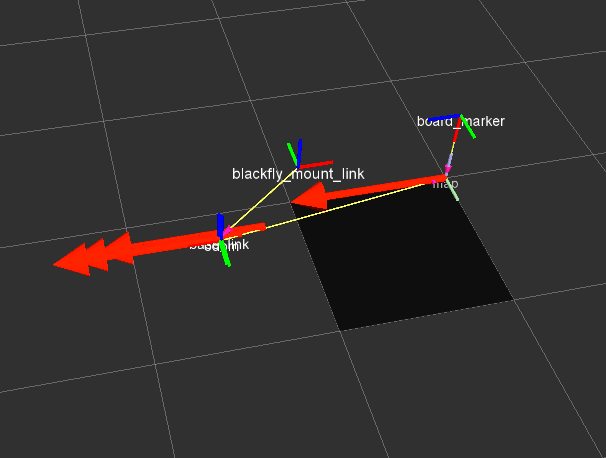
C:\fakepath\Screen Shot 2015-09-14 at 10.42.45 AM.png Rviz
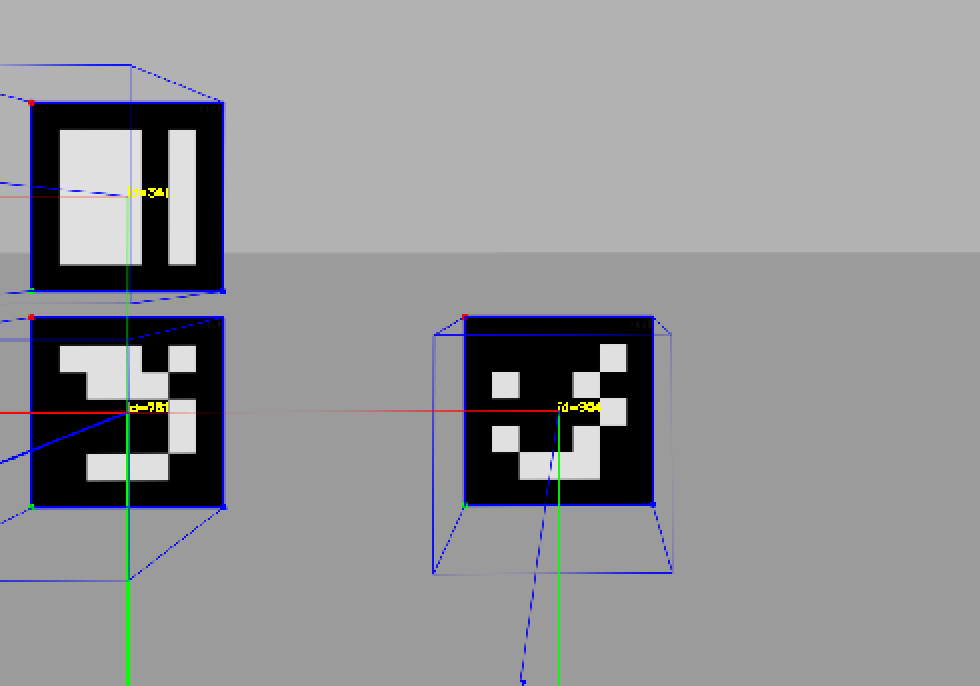
C:\fakepath\Screen Shot 2015-09-14 at 10.44.43 AM.png ar_sys image
| | 3 | No.3 Revision |
Going off of the solution that @tmoore gave, i wanted to share the entire setup that i have which is to big to fit in a comment. FYI, the code changes i made are most likely not the proper way of doing things, but the launch file configurations are good.
Here is a pastebin link to my launch file for Node 1
And another link to my launch file for Node 2
Im first trying to get this to work in a gazebo simulation before trying it on my actual robot. Theres a few things to note that i changed:
geometry_msgs/PoseWithCovarianceStamped instead of a geometry_msgs/PoseMy robot's static transforms are defined like this (i tried using tf2, but i couldnt get the proper rotation of the camera's optical frame unless i used the original tf static publisher)
One thing i need to mention is that when lookup the static tf EDIT:
I no longer have a blackfly_mount_link -> blackfly_optical_link static transform as i instead created a static transform map -> board_marker with only a rotation, to put the ar_sys pose data in the orientation of the robot's base frame.
I only changed the second ekf launch file which you can view here
And you can view the code I use to apply to base_link->blackfly_mount_link transform to the ar_sys pose message, I only lookup base_link -> blackfly_mount_link , rather then blackfly_optical_link which has the rotations (in the attempt to proper conform to the ROS image standards because i couldnt figure out how to apply to rotation of the static transform lookup to the ar_sys poseMsg. So only the translation of the ar_sys pose message is now changed.
data [here] (https://github.com/chicagoedt/rmc_software/blob/master/ar_sys/src/multi_boards.cpp#L183) .
I deleted the old pictures as they where incorrect. Here are a few pictures:
| | 4 | No.4 Revision |
Going off of the solution that @tmoore gave, i wanted to share the entire setup that i have which is to big to fit in a comment. FYI, the code changes i made are most likely not the proper way of doing things, but the launch file configurations are good.
Here is a pastebin link to my launch file for Node 1
And another link to my launch file for Node 2
Im first trying to get this to work in a gazebo simulation before trying it on my actual robot. Theres a few things to note that i changed:
geometry_msgs/PoseWithCovarianceStamped instead of a geometry_msgs/PoseEDIT:
My robot's static transforms are defined like this (i tried using tf2, but i couldnt get the proper rotation of the camera's optical frame unless i used the original tf static publisher)
EDIT:
I no longer have a blackfly_mount_link -> blackfly_optical_link static transform as i instead created a static transform map -> board_marker with only a rotation, to put the ar_sys pose data in the orientation of the robot's base frame.
I only changed the second ekf launch file which you can view here
And you can view the code I use to apply to base_link->blackfly_mount_link transform to the ar_sys pose data [here] (https://github.com/chicagoedt/rmc_software/blob/master/ar_sys/src/multi_boards.cpp#L183) here .
I deleted the old pictures as they where incorrect. Here are some new ones
| | 5 | No.5 Revision |
Going off of the solution that @tmoore gave, i wanted to share the entire setup that i have which is to big to fit in a comment. FYI, the code changes i made are most likely not the proper way of doing things, but the launch file configurations are good.
Here is a pastebin link to my launch file for Node 1
And another link to my launch file for Node 2
Im first trying to get this to work in a gazebo simulation before trying it on my actual robot. Theres a few things to note that i changed:
geometry_msgs/PoseWithCovarianceStamped instead of a geometry_msgs/PoseEDIT:
My robot's static transforms are defined like this (i tried using tf2, but i couldnt get the proper rotation of the camera's optical frame unless i used the original tf static publisher)
I no longer have a blackfly_mount_link -> blackfly_optical_link static transform as i instead created a static transform map -> board_marker with only a rotation, to put the ar_sys pose data in the orientation of the robot's base frame.
I only changed the second ekf launch file which you can view here
And you can view the code I use to apply to base_link->blackfly_mount_link transform to the ar_sys pose data here .
I deleted the old pictures as they where incorrect. Here are some new ones
EDIT 2:
Now that I have the 2 EKF nodes running and all my tf configurations correct, my "map" frame is the fused data of EKF1 (only imu) output and the ar_sys poseWithCovarianceStamped. If i view the data in rviz with Fixed Frame set to "map", I do see the odometry move mostly correct (If need be I can explain why I say mostly, as it is something to do with the code modifications i made to ar_sys): if I move the robot in the +x direction, my EKF2 output is almost dead on, and the orientation is as well (i only have orientation data coming from the imu and not ar_sys). However, if I view the data in rviz with the Fixed Frame set to "odom", I do not see any translational motion, but only orientation data changing (the tail of the vector always remains at the origin). Ive been trying to figure out this for a while now, but this is where I am stuck on as I need translational motion in the odom frame as well.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}